GAN(Generative Adversarial Nets)
GAN(Generative Adversarial Nets)
引言
GAN由Ian J. Goodfellow等人提出,是Ian J. Goodfellow的代表作之一,他还出版了大家耳熟能详的花书(Deep Learning深度学习),GAN主要的思想是同时训练两个模型,生成模型G用于获取数据分布,判别模型D用于估计样本来自训练数据而不是G的概率。G的训练过程是最大化D犯错误的概率。这个过程对应于一个极小极大两人博弈。在任意函数G和D的空间中,存在唯一解,其中G恢复训练数据分布,并且D处处等于1/2。
用一个警察与小偷的故事来阐述:假设一个城市里有许多小偷,在这些小偷中,部分是技艺高超的偷窃高手,另一部分则是毫无技术的新手。警察开始进行对小偷的抓捕,其中一批“学艺不精”的小偷就被捉住了。这些小偷被抓住或许是因为识别他们毫无难度,警察不需要特殊本领,但是剩下的“偷窃高手”警察就很难抓捕。于是警察们开始继续训练自己的破案技术,开始抓住那些技艺高超的小偷。随着这些他们的落网,警察们也练就了特别的本事,他们能很快能从一群人中识别终逮捕嫌犯;随着警察们的水平大大提高,为了避免被捕,小偷们努力表现得不那么“可疑”,而魔高一尺、道高一丈,警察也在不断提高自己的水平,争取将小偷和无辜的普通群众区分开。随着警察和小偷之间的这种“交流”与“切磋”,小偷们都变得非常谨慎,他们有着极高的偷窃技巧,表现得跟普通群众一模一样,而警察们都练就了“火眼金睛”,一旦发现可疑人员,就能马上发现并及时控制——最终,我们同时得到了最强的小偷和最强的警察。其中,小偷就可以视作生成模型G,警察可以视作判别模型D,通过G和D的对抗,能够获得效果较好的生成模型(判别模型也是如此)参考链接
主要架构
根据引言,一个GAN主要包含两个基础模型:生成器(G)与判别器(D)。其中,生成器用于生成新数据,其生成数据的基础往往是一组噪音或者随机数,而判别器用于判断生成的数据和真实数据哪个才是真的。生成器执行无监督任务;而判别器执行有监督任务,用于二分类,其label是“假与真”(0与1)。

生成器的目标是生成尽量真实的数据(这也是我们对生成对抗网络的要求),最好能够以假乱真、让判别器判断不出来,因此生成器的学习目标是让判别器上的判断准确性越来越低;相反,判别器的目标是尽量判别出真伪,因此判别器的学习目标是让自己的判断准确性越来越高。
当生成器生成的数据越来越真时,判别器为维持住自己的准确性,就必须向判别能力越来越强的方向迭代。当判别器越来越强大时,生成器为了降低判别器的判断准确性,就必须生成越来越真的数据。在这个奇妙的关系中,判别器与生成器同时训练、相互内卷,对损失函数的影响此消彼长。参考链接
理论支撑
m i n G m a x D V ( D , G ) = E x ∼ p d a t a ( x ) [ l o g D ( x ) ] + E z ∼ p z ( z ) [ l o g ( 1 − D ( G ( z ) ) ) ] \underset{G}{min}\underset{D}{max}V(D,G) = {\mathbb E_{x \sim{p}_{data}(x)} [logD(x)]} + {\mathbb E _{z \sim{p}_{z}(z)}[{log(1-D({G(z)}))}]} GminDmaxV(D,G)=Ex∼pdata(x)[logD(x)]+Ez∼pz(z)[log(1−D(G(z)))]
V V V是一个值函数(损失函数), x x x表示真实数据, p d a t a p_{data} pdata表示数据的真实分布, z z z是与真实数据相同分布的随机数据, G ( z ) G(z) G(z)是生成器中基于 z z z生成的数据, D ( x ) D(x) D(x)是判别器在真实数据 x x x上判断的结果, D ( G ( x ) ) D(G(x)) D(G(x))表示判别器在生成器生成的数据 G ( z ) G(z) G(z)上判断出的结果。
那么需要做的就是:
1. 对于判别器D来说,尽可能找到生成器生成的数据
2. 对于生成器G来说,尽可能让生成的数据接近真实数据,使得判别器D无法判别出来
上面表达式需要做的是,首先固定G,在D的层面使得值最大(即让判别器能够精确区分真实数据和生成数据),然后固定D,在G的层面使得值最小(即在判别器能够精确区分数据的情况下,让生成器能够生成更接近真实的数据,使得判别器无法区分),从而实现了D和G的对抗,如此可以找到最好的生成器(生成模型)。

图(a)中展示了生成器G、判别器D以及真实数据初始状态,此时真实数据与生成数据分布明显不同,判别器此时也只是初始状态;图(b)展示了判别器经过训练后能够进行区分真实数据和生成数据;图©展示了生成器经过训练后能够更加接近真实分布;图(d)展示了经过多次循环之后,生成器和判别器的状态,此时生成数据已经无限接近真实数据分布,同时判别器难以区分出真实数据和生成数据,导致判别答案始终为1/2。
算法

算法存在的一个问题是需要选择一个较好的k,在算法中要保证:不能一次性让判别器就能够准确的识别出所有生成数据,这会导致生成器没有办法继续提升,生成更加接近真实分布的数据,同时也不能让生成模型一下子生成非常接近真实分布的数据,这会导致判别器难以进行识别能力的提升。
公式分析
对于判别器D
判别器的作用是尽可能找出生成器生成的数据与真实数据分布之间的差异,这是一个二分类的问题,将G固定后,公式就变为:
m a x D V ( D , G ) = E x ∼ p d a t a ( x ) [ l o g D ( x ) ] + E z ∼ p z ( z ) [ l o g ( 1 − D ( G ( z ) ) ) ] \underset{D}{max}V(D,G) = {\mathbb E_{x \sim{p}_{data}(x)} [logD(x)]} + {\mathbb E _{z \sim{p}_{z}(z)}[{log(1-D({G(z)}))}]} DmaxV(D,G)=Ex∼pdata(x)[logD(x)]+Ez∼pz(z)[log(1−D(G(z)))]
该公式等价于交叉熵,只不过交叉熵是取负的对数。这个函数的输入一部分是真实数据,分布为 p d a t a {p_{data}} pdata,一部分是生成器的数据(噪声数据),生成器接收的数据 z z z服从分布 p ( z ) p(z) p(z),输入 z z z经过生成器的计算生产的数据分布设为 p G ( x ) {p_{G}}(x) pG(x),这个函数要取得最大值,必然是对于真实数据 D ( x ) = 1 D(x)=1 D(x)=1,对于生成数据 D ( x ) = 0 D(x)=0 D(x)=0,这一步用于优化D,因此可以简写为
D G ∗ = m a x D V ( G , D ) D_G^* = \underset D {max}V(G,D) DG∗=DmaxV(G,D)
此时,这是D的一元函数,进行求导,得到

取导数为0,算最优点得到

对于生成器G
当且仅当 P G ( x ) = P d a t a ( x ) {P_G}(x) = {P_{data}}(x) PG(x)=Pdata(x)时,有
D G ∗ = P d a t a ( x ) P G ( x ) + P d a t a ( x ) = 1 2 D_G^* = \frac{{{P_{data}}(x)}}{{{P_G}(x) + {P_{data}}(x)}} = \frac{1}{2} DG∗=PG(x)+Pdata(x)Pdata(x)=21
此时生成器无法判别数据是真实数据或者生成数据。
我们假设 P G ( x ) = P d a t a ( x ) {P_G}(x) = {P_{data}}(x) PG(x)=Pdata(x),可以反向推出
V ( G , D G ∗ ) = ∫ x P d a t a ( x ) l o g 1 2 + P G ( x ) l o g ( 1 − 1 2 ) d x {V(G,D_G^*) = \int_x {{P_{data}}(x)log\frac{1}{2}}+ {P_G}(x)log(1 - \frac{1}{2})dx} V(G,DG∗)=∫xPdata(x)log21+PG(x)log(1−21)dx
⇔ V ( G , D G ∗ ) = − log 2 ∫ x P G ( x ) d x − log 2 ∫ x P d a t a ( x ) d x = − 2 log 2 = − log 4 \Leftrightarrow {V(G,D_G^*) = - \log 2\int\limits_x {{P_G}(x)} dx - \log 2\int\limits_x {{P_{data}}(x)} dx = - 2\log 2 = - \log 4} ⇔V(G,DG∗)=−log2x∫PG(x)dx−log2x∫Pdata(x)dx=−2log2=−log4
该值是全局最小值的候选,因为它只有在 P G ( x ) = P d a t a ( x ) {P_G}(x) = {P_{data}}(x) PG(x)=Pdata(x)
的时候才出现。
对于任意一个G,将 D ∗ {D^*} D∗带入到 V ( G , D ) V(G,D) V(G,D)中:

结合KL散度得到:
= − 2 l o g 2 + K L ( P d a t a ( x ) ∣ ∣ P d a t a ( x ) + P G ( x ) 2 ) + K L ( P G ( x ) ∣ ∣ P d a t a ( x ) + P G ( x ) 2 ) { = - 2log2 + KL({P_{data}}(x)||\frac{{{P_{data}}(x) + {P_G}(x)}}{2}) + KL({P_G}(x)||\frac{{{P_{data}}(x) + {P_G}(x)}}{2})} =−2log2+KL(Pdata(x)∣∣2Pdata(x)+PG(x))+KL(PG(x)∣∣2Pdata(x)+PG(x))
最后根据JS散度得到:
V ( G , D ) = − log 4 + 2 ∗ J S D ( P d a t a ( x ) ∣ P G ( x ) ) V(G,D) = - \log 4 + 2*JSD({P_{data}}(x)|{P_G}(x)) V(G,D)=−log4+2∗JSD(Pdata(x)∣PG(x))
根据他的属性:当 P G ( x ) = P d a t a ( x ) {P_G}(x) = {P_{data}}(x) PG(x)=Pdata(x)
时,
为0。综上所述,生成分布当前仅当等于真实数据分布式时,我们可以取得最优生成器。前后逻辑自洽。
注:
对于判别器D的优化:这是一个二分类,满足 y l o g q + ( 1 − y ) l o g ( 1 − q ) ylogq+(1-y)log(1-q) ylogq+(1−y)log(1−q),对于x,标签只会为1,因此只有log(D(x))这一项;对于g(z),其标签只会为0,因此只有log(1-D(G(z)))这一项,因此可以有损失函数:
l o s s = c r o s s E n t r o p y L o s s ( D ( x ) , 1 ) + c r o s s E n t r o p y L o s s ( D ( x ) , 0 ) loss = crossEntropyLoss(D(x),1)+crossEntropyLoss(D(x),0) loss=crossEntropyLoss(D(x),1)+crossEntropyLoss(D(x),0)
对于生成器G的优化:因为D(x)这一项,并不包含生成器的优化参数,因此在求梯度的时候D(x)这一项为0,因此只有log(1-D(G(z)))这一项,损失函数:
l o s s = c r o s s E n t r o p y L o s s ( D ( G ( z ) ) , 1 ) loss = crossEntropyLoss(D(G(z)),1) loss=crossEntropyLoss(D(G(z)),1)
代码
import argparse
import os
import numpy as np
import mathimport torchvision.transforms as transforms
from torchvision.utils import save_imagefrom torch.utils.data import DataLoader
from torchvision import datasets
from torch.autograd import Variableimport torch.nn as nn
import torch.nn.functional as F
import torchos.makedirs("images", exist_ok=True)parser = argparse.ArgumentParser()
parser.add_argument("--n_epochs", type=int, default=50, help="number of epochs of training")
parser.add_argument("--batch_size", type=int, default=64, help="size of the batches")
parser.add_argument("--lr", type=float, default=0.0002, help="adam: learning rate")
parser.add_argument("--b1", type=float, default=0.5, help="adam: decay of first order momentum of gradient")
parser.add_argument("--b2", type=float, default=0.999, help="adam: decay of first order momentum of gradient")
parser.add_argument("--n_cpu", type=int, default=8, help="number of cpu threads to use during batch generation")
parser.add_argument("--latent_dim", type=int, default=100, help="dimensionality of the latent space")
parser.add_argument("--img_size", type=int, default=28, help="size of each image dimension")
parser.add_argument("--channels", type=int, default=1, help="number of image channels")
parser.add_argument("--sample_interval", type=int, default=400, help="interval betwen image samples")
#使用jupyter时需要传入list,
opt = parser.parse_args(args=[])
#opt = parser.parse_args()
#print(opt)#图像形状为:1*28*28,图像大小为784
img_shape = (opt.channels, opt.img_size, opt.img_size)#这里提前做了一下cuda的判断
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")#生成器G,用于进行数据的生成
class Generator(nn.Module):def __init__(self):super(Generator, self).__init__()#定义模型的中间块def block(in_feat, out_feat, normalize=True):layers = [nn.Linear(in_feat, out_feat)] #多个线性层的组合if normalize:layers.append(nn.BatchNorm1d(out_feat, 0.8)) #进行正则化layers.append(nn.LeakyReLU(0.2, inplace=True)) #激活函数return layers#多个模型块进行组合(MLP),输入维度的映射过程为:input_dim->128->256->512->1024->1*28*28self.model = nn.Sequential(*block(opt.latent_dim, 128, normalize=False),*block(128, 256),*block(256, 512),*block(512, 1024),nn.Linear(1024, int(np.prod(img_shape))),nn.Tanh() #Tanh取值范围为-1,1,即将输出映射到-1,1)def forward(self, z):img = self.model(z) #对噪声数据处理进行数据生成img = img.view(img.size(0), *img_shape) #生成数据为(batch_size,1,28,28)return img#判别器D,用于区分真实数据和生成数据
class Discriminator(nn.Module):def __init__(self):super(Discriminator, self).__init__()#维度映射过程:1*28*28->512->256->1,使用sigmoid进行二分类激活,映射为0,1之间的数self.model = nn.Sequential(nn.Linear(int(np.prod(img_shape)), 512),nn.LeakyReLU(0.2, inplace=True),nn.Linear(512, 256),nn.LeakyReLU(0.2, inplace=True),nn.Linear(256, 1),nn.Sigmoid(),)def forward(self, img):img_flat = img.view(img.size(0), -1) #将输入展平validity = self.model(img_flat) #进行判别return validity# Loss function
adversarial_loss = torch.nn.BCELoss() #损失函数使用BCE(二分类交叉熵)# Initialize generator and discriminator
generator = Generator()
discriminator = Discriminator()if cuda:generator.to(device)discriminator.to(device)adversarial_loss.to(device)# Configure data loader
os.makedirs("./data/mnist", exist_ok=True)
#数据集加载
dataloader = torch.utils.data.DataLoader(datasets.MNIST("./data/mnist",train=True,download=True,transform=transforms.Compose([transforms.Resize(opt.img_size), transforms.ToTensor(), transforms.Normalize([0.5], [0.5])]),),batch_size=opt.batch_size,shuffle=True,
)# Optimizers
optimizer_G = torch.optim.Adam(generator.parameters(), lr=opt.lr, betas=(opt.b1, opt.b2))
optimizer_D = torch.optim.Adam(discriminator.parameters(), lr=opt.lr, betas=(opt.b1, opt.b2))# ----------
# Training
# ----------for epoch in range(opt.n_epochs):for i, (imgs, _) in enumerate(dataloader):# Adversarial ground truthsvalid = torch.tensor([[1.0]] * imgs.size(0), requires_grad=False).to(device) #定义真实数据标号为1fake = torch.tensor([[0.0]] * imgs.size(0), requires_grad=False).to(device) #定义虚假数据标号为0# Configure inputreal_imgs = torch.tensor(imgs.type(torch.Tensor)).to(device)# -----------------# Train Generator# -----------------optimizer_G.zero_grad()# Sample noise as generator inputz = torch.tensor(np.random.normal(0, 1, (imgs.shape[0], opt.latent_dim)), dtype=torch.float32).to(device) #随机生成噪声# Generate a batch of imagesgen_imgs = generator(z) #生成数据# Loss measures generator's ability to fool the discriminatorg_loss = adversarial_loss(discriminator(gen_imgs), valid)g_loss.backward()optimizer_G.step()# ---------------------# Train Discriminator# ---------------------optimizer_D.zero_grad()# Measure discriminator's ability to classify real from generated samplesreal_loss = adversarial_loss(discriminator(real_imgs), valid)fake_loss = adversarial_loss(discriminator(gen_imgs.detach()), fake)d_loss = (real_loss + fake_loss) / 2d_loss.backward()optimizer_D.step()print("[Epoch %d/%d] [Batch %d/%d] [D loss: %f] [G loss: %f]"% (epoch, opt.n_epochs, i, len(dataloader), d_loss.item(), g_loss.item()))batches_done = epoch * len(dataloader) + iif batches_done % opt.sample_interval == 0:save_image(gen_imgs.data[:25], "images/%d.png" % batches_done, nrow=5, normalize=True)
参考
参考:
文章1
文章2
文章3
代码
相关文章:
GAN(Generative Adversarial Nets)
GAN(Generative Adversarial Nets) 引言 GAN由Ian J. Goodfellow等人提出,是Ian J. Goodfellow的代表作之一,他还出版了大家耳熟能详的花书(Deep Learning深度学习),GAN主要的思想是同时训练两个模型,生成…...

linux下使用mpi求自然数和
搭建MPI并行计算环境,编写 MPI程序,求和 1 23....1 0000。 要求: 1.使用100个进程; 2.进程0计算1 2...100, 进程1计算101 102... 200, ..... 进程99计算9901 9902... 10000; 3.调用计时函数,分别输出每个进程的计算时间; 4.需使用MPI集群通信函数和同…...

WebGl学习使用attribute变量绘制一个水平移动的点
在WebGL编程中,attribute变量是一种特殊类型的变量,用于从客户端传递数据到顶点着色器。这些数据通常包括顶点的位置、颜色、纹理坐标等,它们是与每个顶点直接相关的信息。attribute变量在顶点着色器中声明,并且对于每个顶点来说都…...

机器学习四大框架详解及实战应用:PyTorch、TensorFlow、Keras、Scikit-learn
目录 框架概述PyTorch:灵活性与研究首选TensorFlow:谷歌加持的强大生态系统Keras:简洁明了的高层 APIScikit-learn:传统机器学习的必备工具实战案例 图像分类实战自然语言处理实战回归问题实战 各框架的对比总结选择合适的框架 1…...

linux源码安装slurm以及mung和openssl
一、源码安装munge 1、编译安装munge (1)下载munge地址:https://github.com/dun/munge/releases (2)解压编译安装: 1 2 3 4 5 6 7 8 创建/data目录 复制文件munge-0.5.15.tar.xz 到/data目录下 tar -Jx…...

分享蓝牙耳机A2DP音频卡顿原因及解决思路
背景 最近一直在更新博客,我觉得写博客有三个好处,一是很多东西时间久了就会忘,记下来方便自己以后回忆和总结,二是记下来可以加深自己对知识的理解,三是可以知识分享,方便他人。 言归正传,今天…...

Mac 下编译 libaom 源码教程
AV1 AV1是一种开放、免版税的视频编码格式,由开放媒体联盟(AOMedia)开发,旨在提供高压缩效率和优秀的视频质量。AV1支持多种分辨率,包括SD、HD、4K和8K,并适用于视频点播(VOD)、直播…...

【成品设计】基于Arduino平台的物联网智能灯
《基于Arduino平台的物联网智能灯》 整体功能: 这个任务中要求实现一个物联网智能灯。实际测试环境中要求设备能够自己创建一个热点,连接这个热点后能自动弹出控制界面(强制门户)。 功能点 基础功能 (60分) 要求作品至少有2个灯…...

安装和配置k8s可视化UI界面dashboard-1.20.6
安装和配置k8s可视化UI界面dashboard-1.20.6 1.环境规划2.初始化服务器1)配置主机名2)设置IP为静态IP3)关闭selinux4)配置主机hosts文件5)配置服务器之间免密登录6)关闭交换分区swap,提升性能7&…...

VLAN:虚拟局域网
VLAN:虚拟局域网 交换机和路由器协同工作后,将原先的一个广播域,逻辑上,切分为多个广播域。 第一步:创建VLAN [SW1]dispaly vlan 查询vlan VID(VLAN ID):用来区分和标定不同的vlan 由12位二进制构成 范围: 0-4…...

利用可解释性技术增强制造质量预测模型
概述 论文地址:https://arxiv.org/abs/2403.18731 本研究提出了一种利用可解释性技术提高机器学习(ML)模型性能的方法。该方法已用于铣削质量预测,这一过程首先训练 ML 模型,然后使用可解释性技术识别不需要的特征并去…...

FlexMatch: Boosting Semi-Supervised Learning with Curriculum Pseudo Labeling
FlexMatch: Boosting Semi-Supervised Learning with Curriculum Pseudo Labeling 摘要:引言:背景3 flexMatch3.1 Curriculum Pseudo Labeling3.2 阈值预热3.3非线性映射函数实验4.1 主要结果4.2 ImageNet上的结果4.3收敛速度加速4.4 消融研究5 相关工作摘要: 最近提出的Fi…...
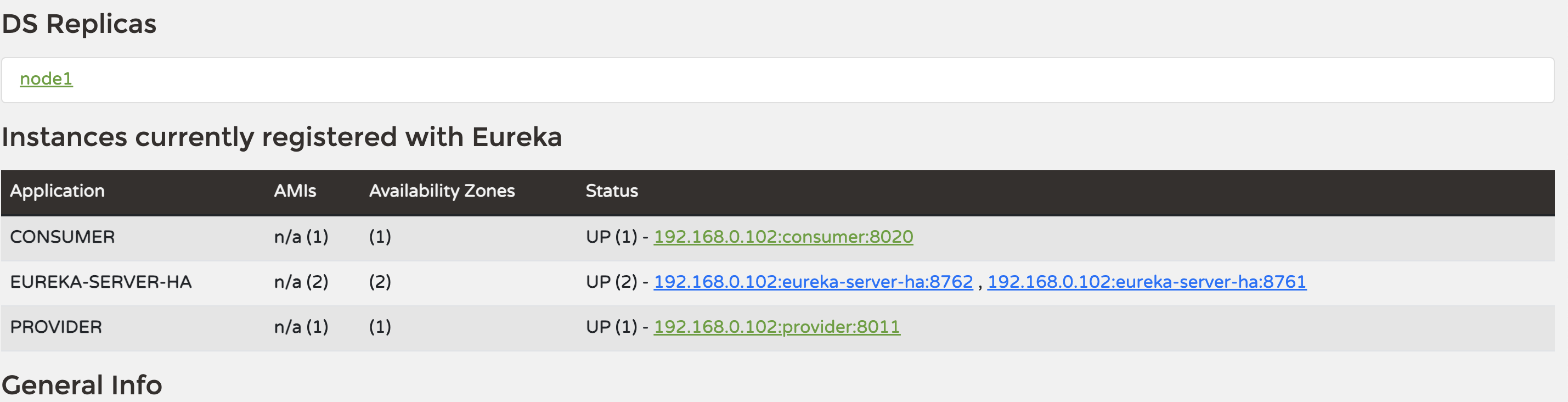
Spring Cloud 3.x 集成eureka快速入门Demo
1.什么是eureka? Eureka 由 Netflix 开发,是一种基于REST(Representational State Transfer)的服务,用于定位服务(服务注册与发现),以实现中间层服务的负载均衡和故障转移ÿ…...
线性代数 矩阵
一、矩阵基础 1、定义 一组数按照矩形排列而成的数表;形似行列式,区别点是 矩阵行列式符号()或[]| |形状方阵或非方阵方阵本质数表数属性A|A|是A诸多属性中的一种维度m *n (m 与n可以相等也可以不相等)n*n 同型矩阵 若A、B两个矩阵都是mn 矩阵&#x…...

【C语言】使用结构体实现位段
文章目录 一、什么是位段二、位段的内存分配1.位段内存分配规则练习1练习2 三、位段的跨平台问题四、位段的应用五、位段使用的注意事项 一、什么是位段 在上一节中我们讲解了结构体,而位段的声明和结构是类似的,它们有两个不同之处,如下&…...

univer实现excel协同
快速入门 <!DOCTYPE html> <html lang"en"> <head><meta charset"UTF-8"><meta name"viewport" content"widthdevice-width, initial-scale1.0"><title>Document</title><script src&q…...

JavaScript进阶笔记--深入对象-内置构造函数及案例
深入对象 创建对象三种方式 利用对象字面量new Object({…})利用构造函数 // 1. 字面量创建对象const obj1 {name: pig,age: 18};console.log(obj1); // {name: "pig", age: 18}// 2. 构造函数创建对象function Pig(name, age) {this.name…...

网络爬虫自动化Selenium模拟用户操作
自动化测试和网络爬虫在现代软件开发中占据着重要的位置。它们通过自动化用户操作,减少了人工重复操作的时间成本。Selenium作为一个功能强大且应用广泛的自动化工具,不仅能在不同的浏览器中运行自动化测试,还能进行跨平台测试,并允许与多种编程语言集成。本教程将介绍如何…...

尚硅谷rabbitmq 2024 流式队列2024指定偏移量 第55节答疑
rabbitmq的stream: 4、对比 autoTrackingstrategy方式:始终监听Stream中的新消息(狗狗看家,忠于职守)指定偏移量方式:针对指定偏移量的消息消费之后就停止(狗狗叼飞盘,回来就完) 这两种分别怎么写?java 在 RabbitMQ 中,…...

NSSCTF-WEB-pklovecloud
目录 前言 正文 思路 尝试 结尾 前言 许久未见,甚是想念. 今天来解一道有意思的序列化题 正文 思路 <?php include flag.php; class pkshow {function echo_name(){return "Pk very safe^.^";} }class acp {protected $cinder;public $neutron;public $…...

Performance-Fish:深度解析《环世界》400%性能优化核心技术
Performance-Fish:深度解析《环世界》400%性能优化核心技术 【免费下载链接】Performance-Fish Performance Mod for RimWorld 项目地址: https://gitcode.com/gh_mirrors/pe/Performance-Fish Performance-Fish 是专为《环世界》(RimWorld&#…...

终极跨平台漫画阅读方案:nhentai-cross全平台使用指南
终极跨平台漫画阅读方案:nhentai-cross全平台使用指南 【免费下载链接】nhentai-cross A nhentai client 项目地址: https://gitcode.com/gh_mirrors/nh/nhentai-cross 你是否厌倦了在不同设备间切换漫画阅读应用?nhentai-cross正是为你量身定制…...

如何用PCL2启动器打造完美的Minecraft模组体验:从零到精通的完整指南
如何用PCL2启动器打造完美的Minecraft模组体验:从零到精通的完整指南 【免费下载链接】PCL Minecraft 启动器 Plain Craft Launcher(PCL)。 项目地址: https://gitcode.com/gh_mirrors/pc/PCL 你是否厌倦了每次启动Minecraft都要手动配…...

高效浏览器视频嗅探工具:猫抓扩展完整使用指南
高效浏览器视频嗅探工具:猫抓扩展完整使用指南 【免费下载链接】cat-catch 猫抓 浏览器资源嗅探扩展 / cat-catch Browser Resource Sniffing Extension 项目地址: https://gitcode.com/GitHub_Trending/ca/cat-catch 猫抓(Cat-Catch)…...

地下态势智能研判,拔高硐室深部安全透明管控等级技术白皮书
地下态势智能研判,拔高硐室深部安全透明管控等级技术白皮书 副标题:全要素三维动态重建井下场景,融合井下无感坐标解算、跨断面跨镜轨迹串联、身体指纹人员轨迹存档,井下风险前置感知、动态全程透明追溯 前言 矿山井下深部硐室与纵…...

基于LLM的长文本摘要工具SumGPT:从原理到本地化部署实战
1. 项目概述:一个为长文本摘要而生的智能工具最近在折腾一些文档处理的工作流,发现一个挺普遍但很烦人的痛点:面对动辄几十页的PDF报告、冗长的会议纪要或是海量的研究论文,想要快速抓住核心要点,简直像大海捞针。手动…...

开源机械爪控制库:从PID算法到ROS集成的全栈开发指南
1. 项目概述:一个开源的机械爪设计与控制库最近在机器人硬件开发的圈子里,开源项目“MeyerZhou/openclaw”引起了不少创客和机器人爱好者的注意。简单来说,这是一个专注于机械爪(或称机械手、夹爪)设计与控制的代码库和…...

Go语言实现跨平台系统更新检查器:自动化运维与安全监控实践
1. 项目概述:一个被低估的系统运维“哨兵”在服务器和桌面系统的日常运维中,有一个场景大家一定不陌生:某天,你管理的服务器突然因为一个已知漏洞被攻击,事后排查发现,相关的安全补丁其实在几周前就已经发布…...

Rekall:基于时空查询的视频内容智能检索开源框架
1. 项目概述:Rekall,一个面向视频时空查询的开源利器 如果你曾经尝试过从一段长视频里,精准地找出“那个穿红色衣服的人从画面左侧走到右侧的片段”,或者想快速定位“所有出现这只特定宠物狗的镜头”,你就会知道这有多…...

AI驱动的Web可访问性审查:LLM如何成为你的自动化无障碍专家
1. 项目概述:一个为AI智能体而生,却意外照亮了所有人的可访问性审查工具 最近在折腾AI智能体(AI Agent)的开发,一个老问题又浮上水面:怎么确保我造出来的这个“数字员工”,能真正服务好所有人&…...