CV(4)--边缘提取和相机模型
前言
仅记录学习过程,有问题欢迎讨论
边缘提取(涉及语义分割):
图象的边缘是指图象局部区域亮度变化显著的部分,也有正负之分,暗到亮为正
-
求边缘的幅度:sobel,Canny算子
-
图像分高频分量和低频分量,高频分量就是灰度变化剧烈的地方(显眼)
图像锐化:目的是使图像的边缘更加清晰,细节部分更加突出,常用拉普拉斯变化核函数。
边缘检测的步骤:边缘检测就是提取高频分量。在边缘像素值会出现”跳跃“或者较大的变化
- 滤波:边缘检测的算法主要是基于图像强度的一阶和二阶导数(为0,一阶极值),但导数通常对噪声很敏感,
所以采用滤波减弱噪声。常见的滤波方法主要有高斯滤波。 - 增强:增强边缘的基础是确定图像各点邻域强度的变化值并凸显出显著变化点。
- 检测:经过增强的图像,往往邻域中有很多点的梯度值比较大,可以采用用阈值化方法来检测方法来对这些点进行取舍。
Canny边缘检测算法:
- 灰度化后高斯滤波:消除噪声
高斯卷积核大小影响Canny检测的性能,越大,检测对噪声敏感越低,定位误差也会增大,5*5还行 - 检测图像的水平/垂直边缘:计算梯度—Sobel算子
用类似于[-1,0,1][-2,0,2][-1,0,1]的矩阵来求梯度的幅值,幅值较大的像素点的为边缘 - 非极大值抑制:去除边缘检测带来的杂散响应
- 搜素局部最大值,抑制非极大值,去除冗余的边缘。通俗就是找到像素局部最大值,其他值置为0,就可以剔除大部分非边缘点。
- 沿着梯度方向比较像素点的值,保留最大像素点
- 双阈值检测和连接边缘:滞后阈值法
- 大于高阈值为强边缘,小于低阈值不是边缘。介于中间是弱边缘。
- 阈值的选择取决于给定输入图像的内容,和噪声点的区别就是是否连续:
相机模型(实际就是坐标系转化):
针孔相机模型存在四个坐标系:世界坐标系、摄像机坐标系、图像物理坐标系和图像像素坐标系。
- 世界坐标系的坐标为Pw(Xw,Yw,Zw),
- 对应的摄像机坐标系坐标为Po(x,y,z),–齐次方程做坐标系变化
- 对应的图像物理坐标系的坐标为P’(x’,y’),–相似三角的原理等比例
- 对应的图像像素坐标系的坐标为p(u,v)。–转化为长度为像素单位!


镜头畸变
- 畸变是由于透镜形状和制造工艺的误差造成的,分为径向畸变和切向畸变。
- 径向畸变是由于透镜形状的曲线造成,分为枕形畸变和桶形畸变。
- 切向畸变是由于透镜制造工艺的误差造成的,分为对称畸变和非对称畸变。
- 可以通过透视变化(投影为新平面)来矫正畸变图片
通过4个点(两组x,y)来确定关系,然后投影新平面图片
Canny算法和透视变化
"""
1-实现canny算法2-实现透视变换
"""
import cv2
import numpy as np# 实现Canny
def CannyDemo(img, low, high):# 灰度化gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)# 高斯滤波blur = cv2.GaussianBlur(gray, (5, 5), 0)# 采用sobel 算子求梯度[x,y方向求梯度,找出变化最大的像素点]grad_x = cv2.Sobel(blur, cv2.CV_16S, 1, 0, ksize=3)grad_y = cv2.Sobel(blur, cv2.CV_16S, 0, 1, ksize=3)# 转回uint8abs_grad_x = cv2.convertScaleAbs(grad_x)abs_grad_y = cv2.convertScaleAbs(grad_y)# 合并梯度dst = cv2.addWeighted(abs_grad_x, 0.5, abs_grad_y, 0.5, 0)# 非极大值抑制dst = cv2.Canny(dst, low, high)return dst# 实现透视变化
def getWarpPerspectiveMatrix(img, dst):nums = img.shape[0]x = np.zeros((2 * nums, 8)) # x*warpMatrix=yy = np.zeros((2 * nums, 1))for i in range(0, nums):x_i = src[i, :]y_i = dst[i, :]x[2 * i, :] = [x_i[0], x_i[1], 1, 0, 0, 0,-x_i[0] * y_i[0], -x_i[1] * y_i[0]]y[2 * i] = y_i[0]x[2 * i + 1, :] = [0, 0, 0, x_i[0], x_i[1], 1,-x_i[0] * y_i[1], -x_i[1] * y_i[1]]y[2 * i + 1] = y_i[1]x = np.mat(x)# 用x.I求出x的逆矩阵,然后与y相乘,求出warpMatrixmatrix = x.I * y # 求出a_11, a_12, a_13, a_21, a_22, a_23, a_31, a_32# 之后为结果的后处理matrix = np.array(matrix).T[0]matrix = np.insert(matrix, matrix.shape[0], values=1.0, axis=0) # 插入a_33 = 1matrix = matrix.reshape((3, 3))return matrixif __name__ == '__main__':img = cv2.imread('lenna.png')# canny边缘检测# canny = CannyDemo(img, 50,150)# cv2.imshow('canny', canny)# cv2.waitKey(0)# 实现透视变化img1 = cv2.imread('photo1.jpg')src = np.float32([[207, 151], [517, 285], [17, 601], [343, 731]])dst = np.float32([[0, 0], [337, 0], [0, 488], [337, 488]])print(img.shape)# 生成透视变换矩阵;进行透视变换result = getWarpPerspectiveMatrix(src, dst)print("warpMatrix:")print(result)img_perspective = cv2.warpPerspective(img1, result, (337, 488))cv2.imshow("img_perspective", img_perspective)cv2.waitKey(0)相关文章:
CV(4)--边缘提取和相机模型
前言 仅记录学习过程,有问题欢迎讨论 边缘提取(涉及语义分割): 图象的边缘是指图象局部区域亮度变化显著的部分,也有正负之分,暗到亮为正 求边缘的幅度:sobel,Canny算子 图像分高频分量和低…...

SORT算法详解及Python实现
目录 SORT算法详解及Python实现第一部分:SORT算法概述与原理1.1 SORT算法简介1.2 应用场景1.3 算法流程第二部分:数学公式与主要模块2.1 卡尔曼滤波模型2.2 目标关联与匈牙利算法2.3 新建与移除机制第三部分:Python实现:SORT算法基础代码3.1 安装依赖3.2 基础代码实现第四部…...

图计算之科普:BSP计算模型、Pregel计算模型、
一、BSP计算模型 BSP计算模型,即整体同步并行计算模型(Bulk Synchronous Parallel Computing Model),又名大同步模型或BSP模型,是由哈佛大学L.G. Valiant教授(2010年图灵奖得主)在1992年提出的…...

pytest入门一:用例的执行范围
从一个或多个目录开始查找,可以在命令行指定文件名或目录名。如果未指定,则使用当前目录。 测试文件以 test_ 开头或以 _test 结尾 测试类以 Test 开头 ,并且不能带有 init 方法 测试函数以 test_ 开头 断言使用基本的 assert 即可 所有的…...

22. 正则表达式
一、概述 正则表达式(regular expression)又称 规则表达式,是一种文本模式(pattern)。正则表达式使用一个字符串来描述、匹配具有相同规格的字符串,通常被用来检索、替换那些符合某个模式(规则&…...

Flink Python作业快速入门
Flink Python快速入门_实时计算 Flink版(Flink)-阿里云帮助中心 import argparse # 用于处理命令行参数和选项,使程序能够接收用户通过命令行传递的参数 import logging import sysfrom pyflink.common import WatermarkStrategy, Encoder, Types from pyflink.data…...

自定义函数库
求两点距离 double dis(double x1, double y1, double x2, double y2){return sqrt(pow(x2-x1, 2)pow(y2-y1, 2)); }判断闰年 bool isLeapYear(int year){return year%40 && year%100!0 || year%4000; }判断素数 bool isPrime(int num){if(num<2) return false;f…...

FreeRTOS例程2-任务挂起恢复与使用中断遇到的坑!
任务挂起简单点理解就是现在不需要执行这个任务,让它先暂停,就是挂起。恢复就是从刚才挂起的状态下继续运行。 API函数 任务挂起vTaskSuspend() 函数原型(tasks.c中): void vTaskSuspend( TaskHandle_t xTaskToSuspend ) 1. 参数: xTaskTo…...

L23.【LeetCode笔记】验证回文串(剖析几种解法)
目录 1.题目 2.自解 提交结果 反思 大小写之间的位运算 提交结果 3.代码优化 提交结果 编辑 4.LeetCode网友提供的解法 1.题目 https://leetcode.cn/problems/XltzEq/description/ 给定一个字符串 s ,验证 s 是否是 回文串 ,只考虑字母和数…...

FPGA 17 ,FPGA 与 SR-IOV虚拟化技术,高性能计算与虚拟化技术的结合(FPGA 与 SR-IOV 和 PCI,高性能计算与虚拟化的完美融合)
目录 前言 一. SR-IOV 的起源与发展 1. SR-IOV 的起源与时间线 2. SR-IOV 的诞生原因 3. SR-IOV 的详细介绍 二. SR-IOV 和 PCI 之间的关系 三. PCI 的起源与演进 1. PCI 的起源与时间线 2. PCI 的关键特性 四. FPGA 的独特魅力 1. FPGA 的定义与特性 2. FPGA 的内…...

解决navicat 导出excel数字为科学计数法问题
一、原因分析 用程序导出的csv文件,当字段中有比较长的数字字段存在时,在用excel软件查看csv文件时就会变成科学技术法的表现形式。 其实这个问题跟用什么语言导出csv文件没有关系。Excel显示数字时,如果数字大于12位,它会自动转化…...

[Unity] AppLovin Max接入Native 广告 Android篇
把下载下来的maxnativelibrary-release-文件放在Plugins/Android下 将这一行加入到mainTemplate.gradle文件中 implementation androidx.constraintlayout:constraintlayout:2.1.4添加下面的两个脚本 using System; using System.Collections; using System.Collections.Gener…...

Source Insight 4.0的安装
一、安装与破解 1、下载Source Insight 4.0安装包 https://pan.baidu.com/s/1t0u1RM19am0lyzhlNTqK9Q?pwdnvmk 2、下载程序破解补丁包 https://pan.baidu.com/s/1irvH-Kfwjf4zCCtWJByqJQ 其中包含文件si4.pediy.lic 和 sourceinsight4.exe。 3、安装下载的Source Insight …...

远程调试软件对比与使用推荐
远程调试软件对比与使用推荐 远程调试是现代软件开发中不可或缺的一部分,尤其是在处理分布式系统、云端服务或远程服务器上的问题时。以下是对几种常见远程调试工具的详细对比和推荐使用场景。 1. GDB (GNU Debugger) 特点 开源:完全免费且开源&…...
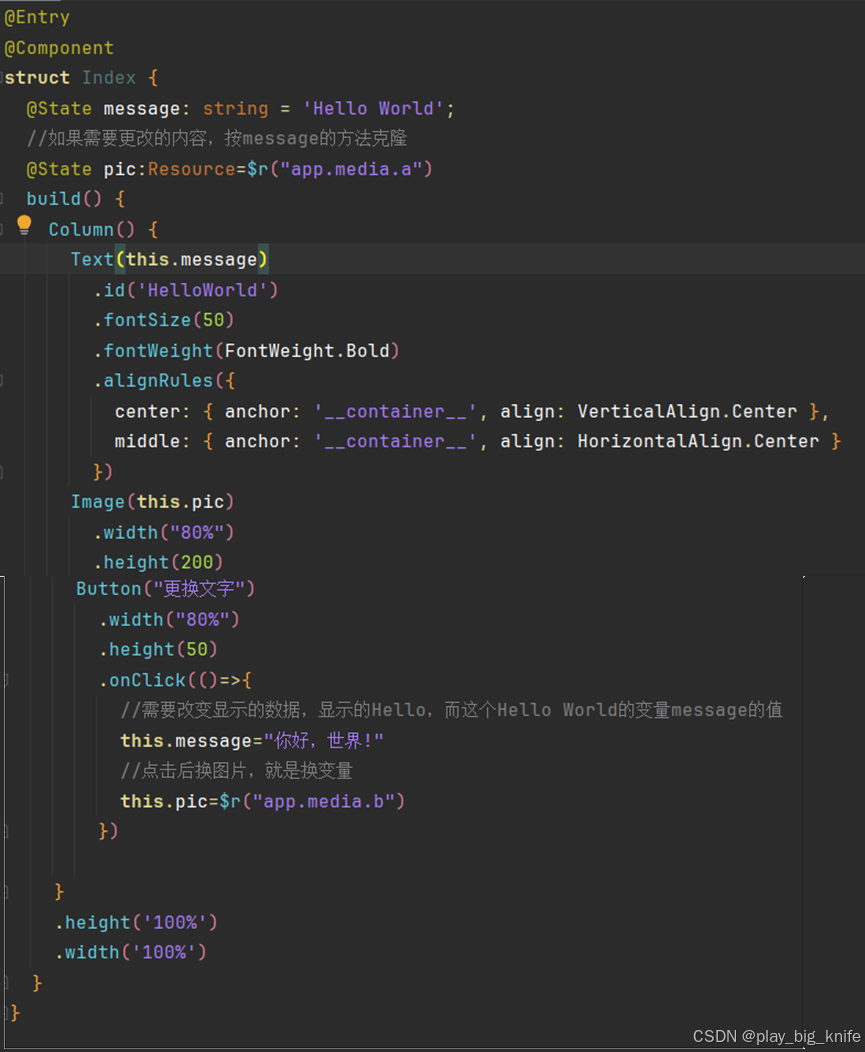
鸿蒙项目云捐助第二讲鸿蒙图文互动基本程序实现
鸿蒙项目云捐助第二讲鸿蒙图文互动基本程序实现 结合第一讲建立的“Hello World”程序,得到如下图所示的界面。 这里的“Hello World”是通过“Priview”显示出来的。在这个界面中进行开发的前奏曲,可以通过点击更换图片的案例来体会一下鸿蒙Next的开发…...

求解球面的一组正交标架
目录 求解球面的一组正交标架 求解球面的一组正交标架 球面 r ( u , v ) ( a cos u cos v , a cos u sin v , a sin u ) \mathbf{r}(u,v)\left(a\cos u\cos v,a\cos u\sin v,a\sin u\right) r(u,v)(acosucosv,acosusinv,asinu), 求得 r u ( − a sin u c…...

php.ini 文件上传/执行时间/部分配置新手教程
1、上传文件大小配置 一般需要同时配置“upload_max_filesize”、“post_max_size”,配置格式如下: file_uploads On ;是否允许HTTP文件上传 upload_max_filesize 2M ;设置单个文件上传的最大尺寸 post_max_size 8M ;设置 POST 请求体的最大尺寸&am…...

【Leetcode Top 100】102. 二叉树的层序遍历
问题背景 给你二叉树的根节点 r o o t root root,返回其节点值的 层序遍历 。 (即逐层地,从左到右访问所有节点)。 数据约束 树中节点数目在范围 [ 0 , 2000 ] [0, 2000] [0,2000] 内 − 1000 ≤ N o d e . v a l ≤ 1000 -1…...

【C++笔记】AVL树
前言 各位读者朋友们大家好,上期我们讲解了map和set这两大容器的使用,这一期我们讲解最早的平衡二叉搜索树——AVL树。 目录 前言一. AVL树的概念二. AVL树的实现2.1 AVL树的结构2.2 AVL树的插入2.2.1 AVL树插入一个值的大致过程2.2.2 平衡因子的更新2…...

【竞技宝】LOL:JDG官宣yagao离队
北京时间2024年12月13日,在英雄联盟S14全球总决赛结束之后,各大赛区都已经进入了休赛期,目前休赛期也快进入尾声,LPL大部分队伍都开始陆续官宣转会期的动向,其中JDG就在近期正式官宣中单选手yagao离队,而后者大概率将直接选择退役。 近日,JDG战队在官方微博上连续发布阵容变动消…...

Keil µVision库模块选择问题解决方案
1. 问题现象解析在Keil Vision IDE 4.53.06版本中,当用户为C51/C251/C166工具链项目添加库文件时,可以通过Options for File对话框选择需要链接的特定模块。这个功能本应记住用户的选择,使得下次打开对话框时保持相同的模块选中状态。但实际使…...

GPS测速仪SpeedView 3.2.0汉化版 精准速度 实时测速工具
一款实时测速应用程序,英文名为“SpeedView”,安装到手机上就能够在开车的时候查看仪表盘车辆的速度是否准确 实时测速:通过GPS精准定位,实时显示当前速度、平均速度和最高速度,支持多种单位切换(km/h、mp…...

WxJava 微信开发包 - 新手入门指南
WxJava 微信开发包 - 新手入门指南项目概览项目名称Binary Wang/WxJavaStarsGVP ⭐⭐⭐⭐⭐组织Binary Wang语言Java标签GVP, Java, 微信开发, 微信公众号, 微信支付项目简介WxJava 是一个基于 Java 的微信开发工具包,支持微信公众号、微信支付、小程序、企业微信等…...

Microsoft Defender双零日在野利用全解析:从BlueHammer到RedSun的终端沦陷之路
前言 2026年5月20日,微软安全响应中心(MSRC)发布紧急安全公告,承认旗下Microsoft Defender存在两个已被野外利用超过一个月的零日漏洞——CVE-2026-41091与CVE-2026-45498。同日,美国国土安全部下属的网络安全与基础设施安全局(CISA)将这两个…...

文档即代码?Claude API文档自动化生成全链路拆解,5步接入CI/CD流水线
更多请点击: https://codechina.net 第一章:文档即代码:Claude API文档自动化生成的核心范式 将API文档视为可版本化、可测试、可部署的一等公民,是现代AI服务工程化的关键跃迁。Claude API的文档不再由人工撰写后静态发布&#…...

互联网软件企业的新建软件系统的缺陷密度
为新建的互联网软件系统设定缺陷密度基线,需要区分其所在的阶段,因为“发布前”和“发布后”的标准差异巨大。同时,也要注意KLOC(千行代码)和FP(功能点)这两种常见度量单位。下面是基于最新行业…...

构建企业级AI对话平台:Open WebUI部署架构深度解析
构建企业级AI对话平台:Open WebUI部署架构深度解析 【免费下载链接】open-webui User-friendly AI Interface (Supports Ollama, OpenAI API, ...) 项目地址: https://gitcode.com/GitHub_Trending/op/open-webui 在AI技术快速发展的今天,如何构建…...

nvm-desktop:图形化Node.js版本管理解决方案
nvm-desktop:图形化Node.js版本管理解决方案 【免费下载链接】nvm-desktop Node Version Manager Desktop - A desktop application to manage multiple active node.js versions. 项目地址: https://gitcode.com/gh_mirrors/nv/nvm-desktop 在Node.js多版本…...

小型团队如何利用Taotoken统一管理多模型API成本
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 小型团队如何利用Taotoken统一管理多模型API成本 对于小型创业团队或项目组而言,同时接入多个大模型服务以获取不同能力…...

linux的常识及术语解释
1. 在Linux系统中,以 文件 方式访问设备 。 2. Linux内核引导时,从文件 /etc/fstab 中读取要加载的文件系统。 3. Linux文件系统中每个文件用 i节点 来标识。 4. 全部磁盘块由四个部分组成,分别为引导块 、专用块 、 i节点表块 和数据存储块。…...