分布式全文检索引擎ElasticSearch-数据的写入存储底层原理
一、数据写入的核心流程
当向 ES 索引写入数据时,整体流程如下:
1、客户端发送写入请求
客户端向 ES 集群的任意节点(称为协调节点,Coordinating Node)发送一个写入请求,比如 index(插入或更新)或 delete(删除)请求。
2、协调节点处理请求
- 协调节点接收到请求后,确定数据应该存储在哪个索引和分片上。
- 通过路由计算确定目标分片,默认的路由规则是通过文档的
_id取哈希值,再对分片数取模来定位分片。
shard = hash(_id) % number_of_primary_shards
3、请求转发给主分片
协调节点将请求转发给对应的 主分片(Primary Shard)所在的节点,主分片负责执行写入操作。
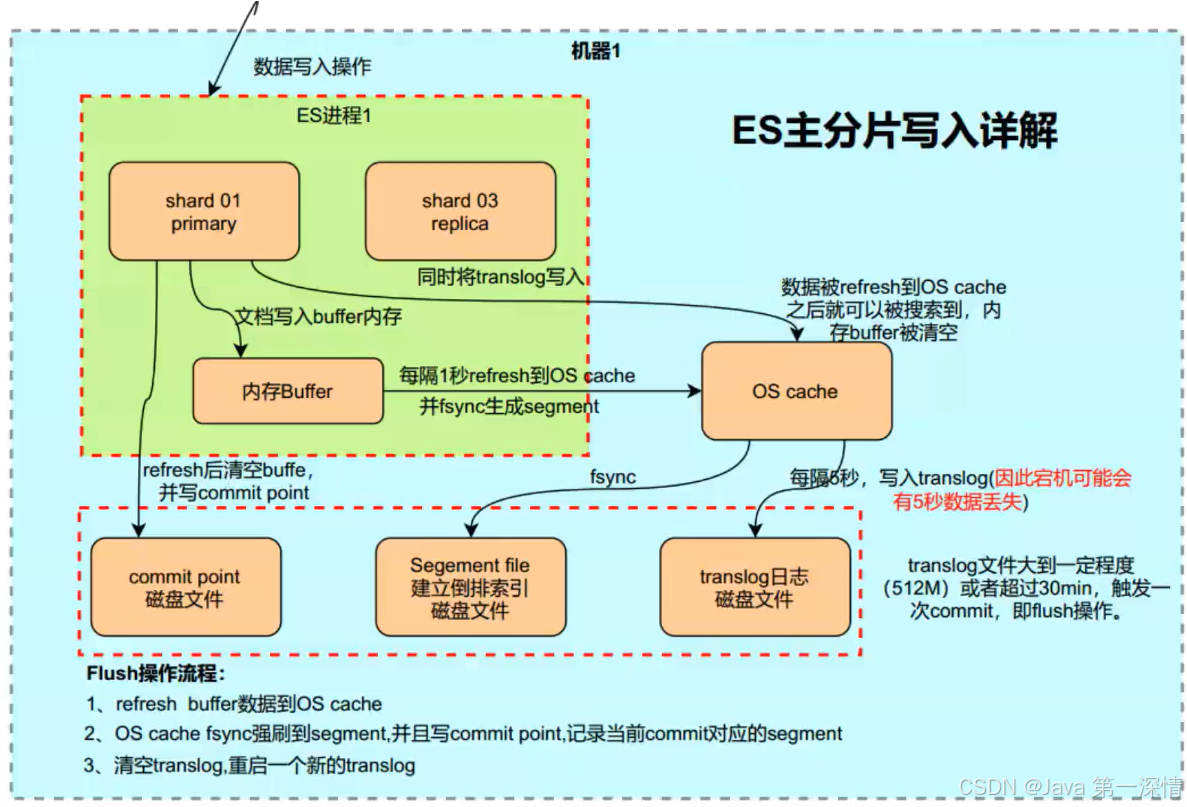
4、主分片写入阶段
主分片接收到写入请求后,执行以下操作:
- 写入内存缓冲区(Buffer):首先将数据写入到内存中的写入缓冲区,这是一块内存区域,用于快速接收新数据。
- 写入事务日志(Translog):同时,将数据写入事务日志(Translog)。Translog 是一个顺序写入的日志文件,用于在节点宕机时进行数据恢复,确保数据不会丢失。
5、数据刷新到段(Segment)
- 定期刷新(Flush):每隔一定时间(默认是 1 秒)或当缓冲区达到一定大小时,ES 会将内存缓冲区中的数据刷新到段(Segment)中。段是倒排索引的基本存储单元。
- 生成新的段文件:数据被写入段后,段文件会被写入磁盘,段文件一旦生成便是不可更改的(只读的)。
- 清空缓冲区:刷新后,内存缓冲区被清空,但 Translog 依然保留,直到执行
flush操作。
6、同步到副本分片
- 主分片写入成功后,将请求转发给对应的 副本分片(Replica Shard) 所在的节点。
- 副本分片执行与主分片相同的写入操作,确保主副本数据一致。
- 当所有副本分片写入成功后,主分片向协调节点返回写入成功的确认。
7、返回写入结果给客户端
协调节点收到主分片和副本分片的成功确认后,向客户端返回写入成功的响应。
二、核心组件介绍
1、内存缓冲区(Buffer)
- 作用:用于临时存储写入的数据,提高写入性能。
- 刷新机制:每隔一段时间(默认 1 秒)或当缓冲区满时,数据会被刷新到段(Segment)。
2、事务日志(Translog)
- 作用:用于记录所有未持久化到段的数据,防止数据丢失。
- 持久化:写入操作在返回成功之前,必须确保数据被写入 Translog。
- Flush 操作:定期将数据从缓冲区刷新到段,并清空 Translog,生成新的空的 Translog。
3、段(Segment)
下一节将详细讲
4、主分片与副本分片
- 主分片(Primary Shard):负责处理写入和查询请求。
- 副本分片(Replica Shard):主分片的冗余副本,用于提高数据可用性和查询性能。
- 一致性:写入时,主分片和副本分片保持数据一致,确保容错能力。
三、段的深度剖析
什么是段
段(Segment) 是倒排索引的基本存储单元。每当数据被写入或更新时,ES 并不会立即将其合并到现有的数据结构中,而是将数据写入新的段。段存储在磁盘上,并以不可变的形式存在。这种设计有助于提升写入和查询的性能,同时简化了数据管理。
段 是一种包含索引数据的小型文件集合,每个段都包含:
- 倒排索引(Inverted Index):用于快速搜索文档的内容。
- 文档元数据(如 _id、分数等)。
- 存储字段(Stored Fields):用于存储完整的文档内容或字段值。
- 删除标记(Deletion Markers):标记哪些文档被逻辑删除。
什么时候生成段?
当 ES 将数据从内存缓冲区刷新(Refresh)到磁盘时,就会创建新的段。这些段会持续累积,直到 ES 触发合并(Merge)操作,将多个小段合并成更大的段。
为什么使用段
-
高效写入
- ES 将数据先写入内存缓冲区,然后批量刷新到新的段,而不是直接修改现有的段。
- 这种批量写入减少了频繁的磁盘操作,提高了写入性能。
-
并发查询与写入
- 由于段是只读的,多个查询可以并发访问这些段,而不会影响写入操作。
- 新数据写入时,不会影响正在查询的旧段,保证了数据的可用性。
-
快速删除与更新
- ES 的删除和更新操作不直接修改段内的数据,而是通过逻辑标记(标记文档为删除)来实现。
- 这种方式避免了频繁的磁盘重写操作,提高了性能。
-
增量合并
- ES 通过定期将多个小段合并成大段,减少段的数量,优化查询性能。
- 合并过程是在后台异步进行的,不影响前台查询和写入。
为什么段是不可变的
-
简化并发控制
- 因为段是不可变的,多个查询可以安全地并发读取相同的段,而无需担心数据被修改或锁定。
- 不需要复杂的并发控制机制,简化了系统设计。
-
提高查询性能
- 由于段不变,ES 可以预先构建和优化倒排索引,确保查询时能够快速检索数据。
- 不可变的段使得查询操作可以直接访问磁盘数据,无需等待写入操作完成。
-
高效的删除和更新
- 删除和更新不会直接修改段内的数据,而是通过生成新的段和标记旧段来完成。
- 这种方式避免了频繁的随机写入,提高了磁盘写入性能。
-
崩溃恢复与数据安全
- 不可变的段一旦写入磁盘,就不会被更改。这意味着即使 ES 崩溃,已写入的段不会丢失或损坏。
- 恢复时,只需要重新应用事务日志(Translog)中尚未刷新的数据。
四、为什么说ES的检索是近实时的
如果ES像MySQL一样,等到数据真正落盘完毕,才返回写入成功,这叫直接写入方式,这能达到实时搜索。但是这会有什么样的问题呢?
直接写入存在的问题
提交一个新的段到磁盘需要 fsync操作,确保段被物理地写入磁盘,即时电源失效也不会丢失数据。
但是 fsync 是昂贵的,严重影响性能,当写数据量大的时候会造成ES 停顿卡死,查询也无法做到快速响应新文档在几分钟之内即可被检索,并且这样还是不够快,磁盘在这里成为了瓶颈。
延时写策略
所以 fsync不能在每个文档被索引的时就触发,需要一种更轻量级的方式使新的文档可以被搜索,所以为了提升写的性能,ES没有每新增一条数据就增加一个段到磁盘上而是采用延时写的策略。
具体做法如下:
每当有新增的数据时,就将其先写入到内存中
在内存和磁盘之间是文件系统缓存,当达到默认的时间(1秒钟)或者内存的数据达到一定量时,会触发一次刷新(Refresh),将内存中的数据生成到一个新的段上并缓存到文件缓存系统上,稍后再被刷新到磁盘中并生成提交点。
相关文章:
分布式全文检索引擎ElasticSearch-数据的写入存储底层原理
一、数据写入的核心流程 当向 ES 索引写入数据时,整体流程如下: 1、客户端发送写入请求 客户端向 ES 集群的任意节点(称为协调节点,Coordinating Node)发送一个写入请求,比如 index(插入或更…...
react中实现导出excel文件
react中实现导出excel文件 一、安装依赖二、实现导出功能三、自定义列标题四、设置列宽度五、样式优化1、安装扩展库2、设置样式3、扩展样式功能 在 React 项目中实现点击按钮后导出数据为 Excel 文件,可以使用 xlsx 和 file-saver 这两个库。 一、安装依赖 在项目…...

有监督学习 vs 无监督学习:机器学习的两大支柱
有监督学习 vs 无监督学习:机器学习的两大支柱 有监督学习 vs 无监督学习:机器学习的两大支柱一、有无“老师”来指导二、解决的问题类型不同三、模型的输出不同 有监督学习 vs 无监督学习:机器学习的两大支柱 在机器学习的奇妙世界里&#…...

c4d动画怎么导出mp4视频,c4d动画视频格式设置
宝子们,今天来给大家讲讲 C4D 咋导出mp4视频的方法。通过用图文教程的形式给大家展示得明明白白的,让你能轻松理解和掌握,不管是理论基础,还是实际操作和技能技巧,都能学到,快速入门然后提升自己哦。 c4d动…...
差分矩阵(Difference Matrix)与累计和矩阵(Running Sum Matrix)的概念与应用:中英双语
本文是学习这本书的笔记: https://web.stanford.edu/~boyd/vmls/ 差分矩阵(Difference Matrix)与累计和矩阵(Running Sum Matrix)的概念与应用 在线性代数和信号处理等领域中,矩阵运算常被用来表示和计算各种数据变换…...

全面解析 Golang Gin 框架
1. 引言 在现代 Web 开发中,随着需求日益增加,开发者需要选择合适的工具来高效地构建应用程序。对于 Go 语言(Golang)开发者来说,Gin 是一个备受青睐的 Web 框架。它轻量、性能高、易于使用,并且具备丰富的…...

全脐点曲面当且仅当平面或者球面的一部分
S 是全脐点曲面当且仅当 S 是平面或者球面的一部分。 S_\text{ 是全脐点曲面当且仅当 }{S_\text{ 是平面或者球面的一部分。}} S 是全脐点曲面当且仅当 S 是平面或者球面的一部分。 证: 充分性显然,下证必要性。 若 r ( u , v ) r(u,v) r(u,v)是…...
CSS学习记录18
CSS渐变 CSS渐变您可以显示两种或多种指定颜色之间的平滑过渡。 CSS定义了两种渐变类型: 线性渐变(向下/向上/向左/向右/对角线)径向渐变(由其中心定义) CSS线性渐变 如需创建线性渐变,您必须至少两个色…...

实验13 C语言连接和操作MySQL数据库
一、安装MySQL 1、使用包管理器安装MySQL sudo apt update sudo apt install mysql-server2、启动MySQL服务: sudo systemctl start mysql3、检查MySQL服务状态: sudo systemctl status mysql二、安装MySQL开发库 sudo apt-get install libmysqlcli…...
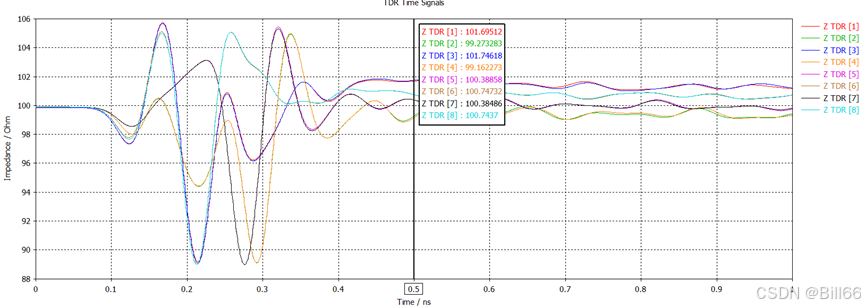
90度Floating B to B 高速连接器信号完整性仿真
在180度 B to B Connector 信号完整性仿真时,不会碰到端口设置不方便问题,但在做90度B to B Connector信号完整性仿真时就会碰到端口设置问题。如下面的90度B to B Connector。 公座 母座 公母对插后如下: 客户要求改Connector需符合PCI-E3.…...
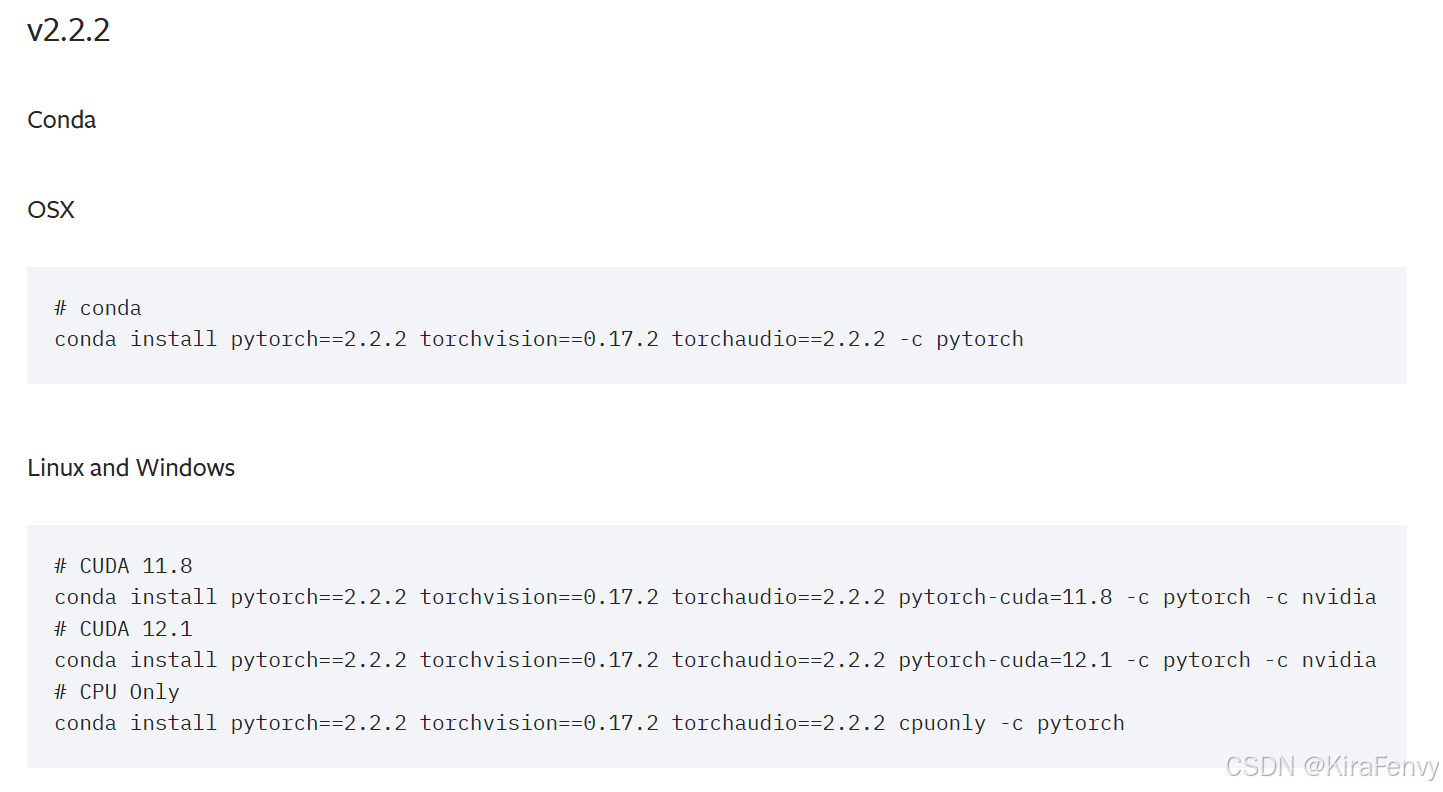
【踩坑】Pytorch与CUDA版本的关系及安装
Pytorch、CUDA和CUDA Toolkit区分 查看当前环境常用shell命令python脚本 Driver API CUDA(nvidia-smi)Runtime API CUDA(nvcc --version)pytorch选择CUDA版本的顺序安装需要的CUDA,多版本共存和自由切换 本文参考 http…...

信息隐藏 数字图像空域隐写与分析技术的实现
数字图像隐写与分析 摘要 随着信息技术的发展,隐写术作为一种信息隐藏技术,越来越受到关注。本文介绍了一种基于最低有效位(LSB)方法的数字图像隐写技术,并实现了隐写数据的嵌入与提取。通过卡方检验分析隐写图像的统计特性,评估隐写数据对图像的影响。实验结果表明,该…...

halcon单相机+机器人*眼在手外标定心得
目的 得到相机坐标系下的点与机器人底座base的转换关系,camera_in_base 两个不确定的定量 1,相机与机器人底座base之间的相对位置是固定的,既camera_in_base 2,机械手末端与标定物 tool_in_obj是固定的 辅助确定量 工作台与相…...

pytest入门十:配置文件
pytest.ini:pytest的主配置文件,可以改变pytest的默认行为conftest.py:测试用例的一些fixture配置 pytest.ini marks mark 打标的执行 pytest.mark.add add需要些marks配置否则报warning [pytest] markersadd:测试打标 测试用例中添加了 p…...
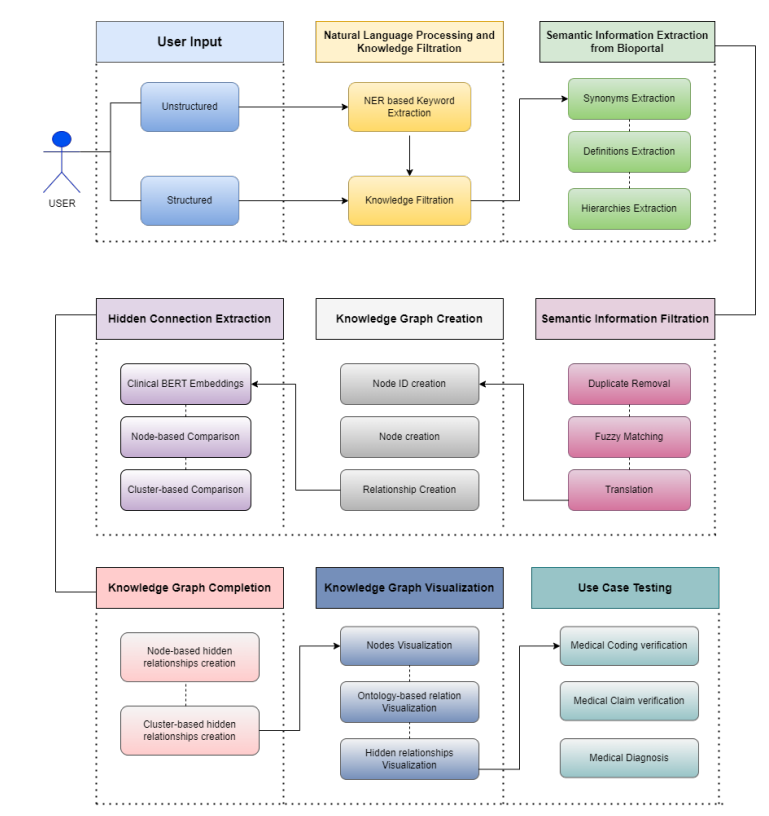
基于Clinical BERT的医疗知识图谱自动化构建方法,双层对比框架
基于Clinical BERT的医疗知识图谱自动化构建方法,双层对比框架 论文大纲理解1. 确认目标2. 目标-手段分析3. 实现步骤4. 金手指分析 全流程核心模式核心模式提取压缩后的系统描述核心创新点 数据分析第一步:数据收集第二步:规律挖掘第三步&am…...

介绍 Html 和 Html 5 的关系与区别
HTML(HyperText Markup Language)是构建网页的标准标记语言,而 HTML5 是 HTML 的最新版本,包含了一些新的功能、元素、API 和属性。HTML5 相对于早期版本的 HTML(比如 HTML4)有许多重要的改进和变化。以下是…...

C05S13-MySQL数据库备份与恢复
一、MySQL数据备份 1. 数据备份概述 数据备份的主要目的是灾难恢复,也就是当数据库等出现故障导致数据丢失,能够通过备份恢复数据。 数据备份可以分为物理备份和逻辑备份。物理备份,又称为冷备份,需要关闭数据库进行备份&#…...

【MySQL — 数据库基础】深入理解数据库服务与数据库关系、MySQL连接创建、客户端工具及架构解析
目录 1. 数据库服务&数据库&表之间的关系 1.1 复习 my.ini 1.2 MYSQL服务基于mysqld启动而启动 1.3 数据库服务的具体含义 1.4 数据库服务&数据库&表之间的关系 2. 客户端工具 2.1 客户端连接MySQL服务器 2.2 客…...
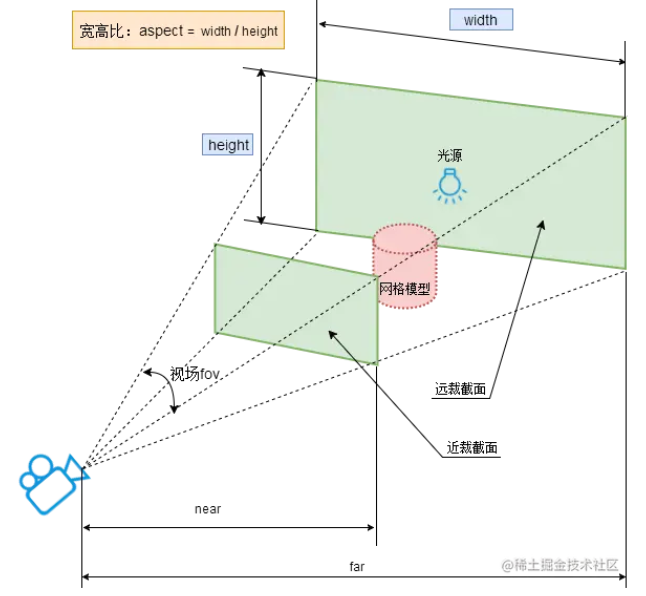
Three.js相机Camera控件知识梳理
原文:https://juejin.cn/post/7231089453695238204?searchId20241217193043D32C9115C2057FE3AD64 1. 相机类型 Three.js 主要提供了两种类型的相机:正交相机(OrthographicCamera)和透视相机(PerspectiveCamera&…...

Unity 开发Apple Vision Pro空间锚点应用Spatial Anchor
空间锚点具有多方面的作用 虚拟物体定位与固定: 位置保持:可以把虚拟物体固定在现实世界中的特定区域或位置。即使使用者退出程序后再次打开,之前锚定过的虚拟物体仍然能够出现在之前所锚定的位置,为用户提供连贯的体验。比如在一…...

苏州配电工程为什么优先本地一站式厂家?
配电工程常见的落地痛点在苏州,各类配电工程项目数量众多,推进过程中普遍存在多方对接复杂、流程繁琐、责任推诿等问题。若将设计、生产、安装、售后等环节分别委托给不同单位,一旦出现问题,各方往往互相推诿,责任难以…...

如何使用AI代码库分析工具快速掌握gRPC:高性能服务通信的终极指南
如何使用AI代码库分析工具快速掌握gRPC:高性能服务通信的终极指南 【免费下载链接】Tutorial-Codebase-Knowledge Pocket Flow: Codebase to Tutorial 项目地址: https://gitcode.com/gh_mirrors/tu/Tutorial-Codebase-Knowledge 你是否曾经面对复杂的gRPC代…...

终极指南:如何用apt-offline在无网环境下管理Debian软件包
终极指南:如何用apt-offline在无网环境下管理Debian软件包 【免费下载链接】apt-offline Offline APT Package Manager 项目地址: https://gitcode.com/gh_mirrors/ap/apt-offline 你是否曾因网络连接不稳定而无法更新Debian系统?或者需要在完全离…...

ARM调试接口技术:SWD与JTAG协议切换机制详解
1. ARM调试接口技术深度解析 在嵌入式系统开发领域,调试接口如同工程师的"听诊器",是连接开发环境与目标芯片的重要通道。作为行业标准,ARM架构提供了两种主流的调试协议:串行线调试(SWD)和JTAG。这两种协议各有特点&am…...

Ollama Web UI部署指南:EVA项目实战与本地大模型管理
1. 项目概述:当开源AI助手遇上本地化部署最近在折腾本地大语言模型部署的朋友,可能都绕不开一个名字:Ollama。它确实让拉取和运行各种开源模型变得像ollama run llama3一样简单。但不知道你有没有和我一样的感受——用久了命令行,…...

AI图像生成数据集管理工具splitrail:从数据整理到训练导出的高效工作流
1. 项目概述:一个为AI图像生成量身定制的开源数据集管理工具如果你和我一样,深度参与过AI绘画模型的训练或微调,那你一定对“数据”这两个字又爱又恨。爱的是,高质量的数据集是模型效果的基石;恨的是,从海量…...

glm-switch:ChatGLM多版本模型一键切换与环境管理工具详解
1. 项目概述与核心价值 最近在折腾大语言模型本地部署和推理时,遇到了一个挺实际的问题:手头有几个不同版本的 ChatGLM 模型权重文件,比如 GLM-6B、GLM-10B,还有社区微调过的各种版本。每次想切换模型做测试或者对比效果…...
)
【SPIE出版】黄冈师范学院主办!第四届大数据、计算智能与应用国际会议(BDCIA 2026)
第四届大数据、计算智能与应用国际会议(BDCIA 2026)将于2026年11月6-8日在中国黄冈召开。本次大会由黄冈师范学院主办,旨在汇聚全球学术界与产业界的专家学者、研究人员及工程技术人员,共同探讨大数据、计算智能及相关应用领域的前…...
」如何将任务完成率提升至92.7%(实测数据))
为什么头部科技公司已秘密部署ChatGPT 2026预览版?揭秘其「上下文感知决策树(CADT)」如何将任务完成率提升至92.7%(实测数据)
更多请点击: https://intelliparadigm.com 第一章:ChatGPT 2026预览版的演进脉络与战略定位 ChatGPT 2026预览版并非简单的能力叠加,而是OpenAI在可信AI、实时协同与领域自治三大范式下的系统性重构。其核心突破在于将推理过程从黑盒调用转向…...

告别ST-LINK Utility:一文详解STM32CubeProgrammer在Win10下的新特性与高效用法
STM32CubeProgrammer全面指南:解锁Win10下高效开发的六大核心能力 在嵌入式开发领域,工具链的每一次迭代都意味着效率的跃升。当STMicroelectronics宣布STM32CubeProgrammer正式取代经典的ST-LINK Utility时,许多开发者还在犹豫是否要迁移到这…...