步进电机位置速度双环控制实现
步进电机位置速度双环控制实现
野火stm32电机教学
提高部分-第11讲 步进电机位置速度双环控制实现(1)_哔哩哔哩_bilibili
PID模型

位置环作为外环,速度环作为内环。设定目标位置和实际转轴位置的位置偏差,经过位置PID获得位置期望,然后讲位置期望(位置变化反映了转轴的速度)和实际转轴速度作为差值,经过速度PID获得速度期望,然后控制步进电机的输入脉冲频率,调整电机转速。
实验环境
【*】 程序简介
-工程名称:步进电机-位置环控制-位置式PID
-实验平台: 野火STM32 F103 拂晓 开发板
【 !】功能简介:
位置速度环例程 默认使用从PID调试助手界面打开串口
【 !】实验操作:
下载本程序,复位开发板即可。
【 !!】注意事项:
步进电机驱动器使用32细分
/************************************************************/
步进电机驱动器接口1:PUL+<--->VCOMPUL-<--->PC6DIR+<--->VCOMDIR-<--->PE6ENA+<--->VCOMENA-<--->PE5
编码器与步进电机的接线红线+5V <------------>VENC黑线GND <------------->GNDA相蓝线 <------------>PD12B相绿线 <------------>PD13Z相黄线 <------------>PD14屏蔽线()<------------>GND(没有PIN屏蔽线的可以不接)
/*************************************************************************/
【*】 时钟
A.晶振:
-外部高速晶振:8MHz
-RTC晶振:32.768KHz
B.各总线运行时钟:
-系统时钟 = SYCCLK = AHB = 72MHz
-APB2 = 72MHz
-APB1 = 36MHz定时器输出PWM控制步进电机
定时器8,通道1,时钟频率72MHz ,预分频因子为16,重装载值0xFFFF,
//Motor 脉冲
#define MOTOR_PUL_IRQn TIM8_CC_IRQn
#define MOTOR_PUL_IRQHandler TIM8_CC_IRQHandler#define MOTOR_PUL_TIM TIM8
#define MOTOR_PUL_CLK_ENABLE() __HAL_RCC_TIM8_CLK_ENABLE()#define MOTOR_PUL_PORT GPIOC
#define MOTOR_PUL_PIN GPIO_PIN_6
#define MOTOR_PUL_GPIO_CLK_ENABLE() __HAL_RCC_GPIOC_CLK_ENABLE()
#define MOTOR_PUL_CHANNEL_x TIM_CHANNEL_1#define MOTOR_TIM_IT_CCx TIM_IT_CC1
#define MOTOR_TIM_FLAG_CCx TIM_FLAG_CC1
/*频率相关参数*/
//定时器实际时钟频率为:72MHz/TIM_PRESCALER
//具体需要的频率可以自己计算
#define TIM_PRESCALER 16 /*补充:对F103例程测试,提高分频利于位置环稳定状态*/
// 定义定时器周期,输出比较模式周期设置为0xFFFF
#define TIM_PERIOD 0xFFFF比较输出模式的反转模式
/********************************************************************************* @file bsp_stepper_init.c* @author fire* @version V1.0* @date 2019-xx-xx* @brief 步进电机初始化******************************************************************************* @attention** 实验平台:野火 STM32 F103 开发板 * 论坛 :http://www.firebbs.cn* 淘宝 :http://firestm32.taobao.com********************************************************************************/
#include "./stepper/bsp_stepper_init.h"TIM_HandleTypeDef TIM_StepperHandle;__IO uint16_t OC_Pulse_num = 65535; //比较输出的计数值/*** @brief 中断优先级配置* @param 无* @retval 无*/
static void TIMx_NVIC_Configuration(void)
{/* 外设中断配置 */HAL_NVIC_SetPriority(MOTOR_PUL_IRQn, 0, 0);HAL_NVIC_EnableIRQ(MOTOR_PUL_IRQn);
}/*** @brief 配置TIM复用输出PWM时用到的I/O* @param 无* @retval 无*/
static void Stepper_GPIO_Config(void)
{GPIO_InitTypeDef GPIO_InitStruct;/*开启Motor相关的GPIO外设时钟*/MOTOR_DIR_GPIO_CLK_ENABLE();MOTOR_PUL_GPIO_CLK_ENABLE();MOTOR_EN_GPIO_CLK_ENABLE();/*选择要控制的GPIO引脚*/ GPIO_InitStruct.Pin = MOTOR_DIR_PIN; /*设置引脚的输出类型为推挽输出*/GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; GPIO_InitStruct.Pull =GPIO_PULLUP;/*设置引脚速率为高速 */ GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;/*Motor 方向引脚 初始化*/HAL_GPIO_Init(MOTOR_DIR_GPIO_PORT, &GPIO_InitStruct); /*Motor 使能引脚 初始化*/GPIO_InitStruct.Pin = MOTOR_EN_PIN; HAL_GPIO_Init(MOTOR_EN_GPIO_PORT, &GPIO_InitStruct); /* 定时器通道1功能引脚IO初始化 *//*设置输出类型*/GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;/*设置引脚速率 */ GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;/*设置复用*/GPIO_InitStruct.Pull =GPIO_PULLUP;/*选择要控制的GPIO引脚*/ GPIO_InitStruct.Pin = MOTOR_PUL_PIN;/*Motor 脉冲引脚 初始化*/HAL_GPIO_Init(MOTOR_PUL_PORT, &GPIO_InitStruct);
}/** 注意:TIM_TimeBaseInitTypeDef结构体里面有5个成员,TIM6和TIM7的寄存器里面只有* TIM_Prescaler和TIM_Period,所以使用TIM6和TIM7的时候只需初始化这两个成员即可,* 另外三个成员是通用定时器和高级定时器才有.*-----------------------------------------------------------------------------* TIM_Prescaler 都有* TIM_CounterMode TIMx,x[6,7]没有,其他都有(基本定时器)* TIM_Period 都有* TIM_ClockDivision TIMx,x[6,7]没有,其他都有(基本定时器)* TIM_RepetitionCounter TIMx,x[1,8]才有(高级定时器)*-----------------------------------------------------------------------------*/
void TIM_PWMOUTPUT_Config(void)
{TIM_OC_InitTypeDef TIM_OCInitStructure; /*使能定时器*/MOTOR_PUL_CLK_ENABLE();TIM_StepperHandle.Instance = MOTOR_PUL_TIM; /* 累计 TIM_Period个后产生一个更新或者中断*/ ///当定时器从0计数到TIM_PERIOD-1,即为TIM_PERIOD次相关文章:
步进电机位置速度双环控制实现
步进电机位置速度双环控制实现 野火stm32电机教学 提高部分-第11讲 步进电机位置速度双环控制实现(1)_哔哩哔哩_bilibili PID模型 位置环作为外环,速度环作为内环。设定目标位置和实际转轴位置的位置偏差,经过位置PID获得位置期望,然后讲位置期望(位置变化反映了转轴的速…...

优化程序中的数据:从数组到代数
前言 我们往往都希望优化我们的程序,使之达到一个更好的效果,程序优化的一个重点就是速度,加快速度的一个好办法就是使用并行技术,但是,并行时我们要考虑必须串行执行的任务,也就是有依赖关系的任务&#…...

【电商搜索】CRM: 具有可控条件的检索模型
【电商搜索】CRM: 具有可控条件的检索模型 目录 文章目录 【电商搜索】CRM: 具有可控条件的检索模型目录文章信息摘要研究背景问题与挑战如何解决核心创新点算法模型实验效果(包含重要数据与结论)相关工作后续优化方向 后记 https://arxiv.org/pdf/2412.…...

使用 ffmpeg 拼接合并视频文件
按顺序拼接多个视频文件 1、创建文件清单 创建一个文本文件 filelist.txt,列出所有要合并的视频文件。 格式如下: file path/to/video1.mp4 file path/to/video2.mp4 file path/to/video3.mp42、合并文件 下载FFmpeg,然后使用FFmpeg进行…...
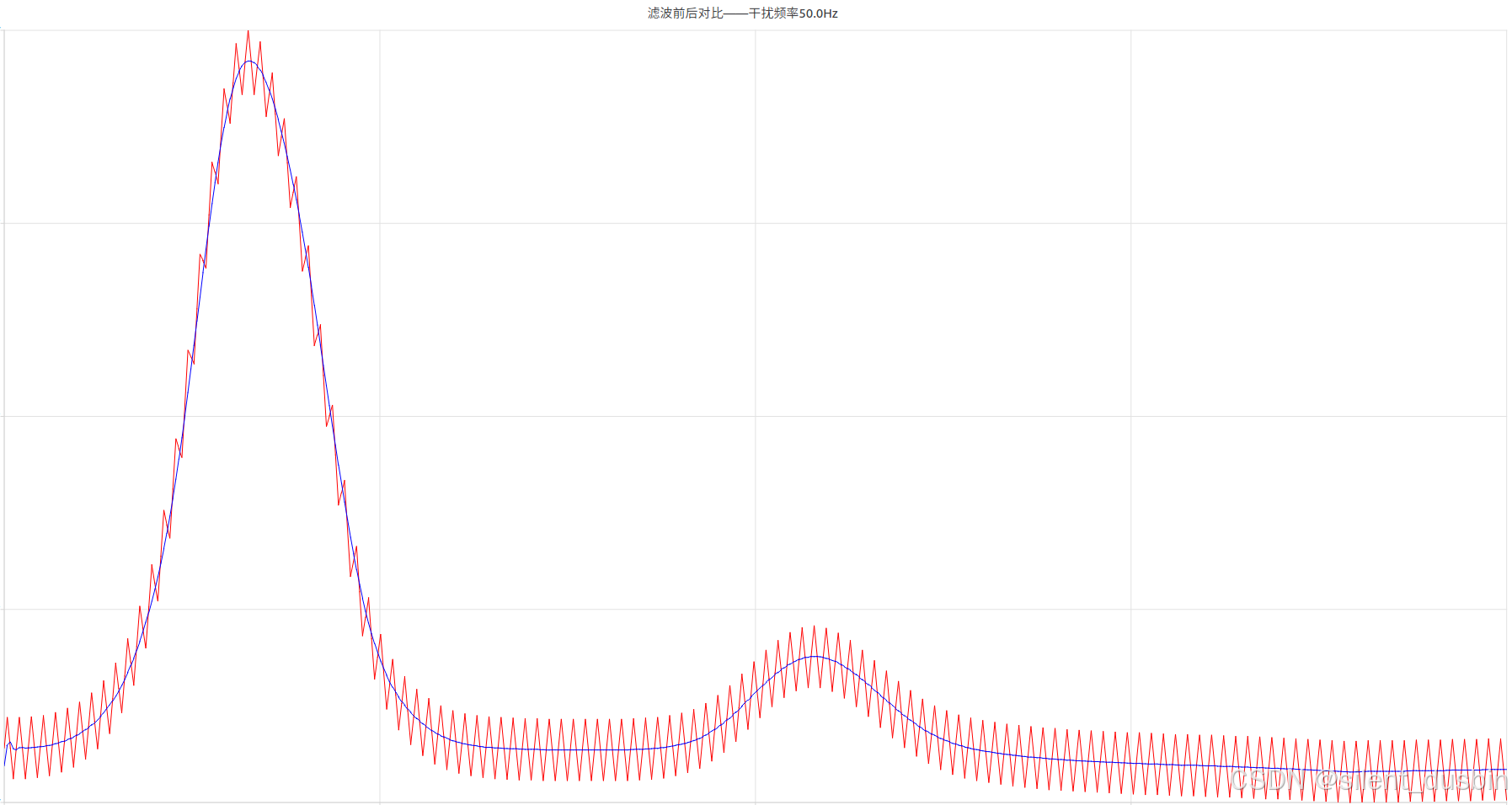
【信号滤波 (上)】傅里叶变换和滤波算法去除ADC采样中的噪声(Matlab/C++)
目录 一、ADC采样的噪声简介1.1 常见的ADC噪声来源 二、信号的时域到频域转换2.1 傅里叶变换巧记傅里叶变换 三、傅里叶变换和滤波算法工程实现3.1 使用Matlab计算信号时域到频域的变换3.2 使用Matlab去除特定频点噪声寻找峰值算噪声频率构建陷波滤波器滤除噪声频点陷波滤波器与…...

Idea内,光标显示问题
键盘误触导致光标显示为白色块 解决方式 任选其一 键盘敲击 Ins 键(既 insert 键)Shift 0(数字零)...
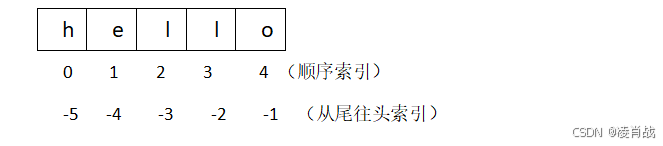
回顾 python3中字符串
一. 简介 前面学习了 python3中的字符串, 本文回顾一下 python3中的字符串。 二. python3中的字符串 1. 创建字符串 字符串是 python中最常用的数据类型。我们可以使用引号( 或者 " )来创建字符串。 创建字符串很简单,…...

代码随想录day23 | leetcode 39.组合总和 40.组合总和II 131.分割回文串
39.组合总和 Java class Solution { List<List<Integer>> result new ArrayList<>();LinkedList<Integer> path new LinkedList<>();public List<List<Integer>> combinationSum(int[] candidates, int target) {Arrays.sor…...
备考实战之分支结构(switch语句))
全国青少年信息学奥林匹克竞赛(信奥赛)备考实战之分支结构(switch语句)
if语句处理多个分支时需要用if-else if结构,分支越多,嵌套的if语句层就越多,程序不但庞大、复杂,理解起来也比较困难。在C编程中,针对有些问题除了使用if-else if结构之外,还有switch语句也可以实现&#x…...

R机器学习:决策树算法的理解与实操
今天继续给大家介绍决策树算法,决策树本身是一种非常简单直观的机器学习算法,用于做分类或回归任务。它就像我们平常做决定时的过程,通过逐步排除可能的选项,最终得出结论。 A decision tree is a flowchart-like structure used …...
解锁高效学习之道:从认知升级到实践突破
目录 学习之困:探寻低效的根源 (一)迷茫之境:目标缺失的困扰 (二)表象之迷:浅尝辄止的学习 (三)行动之阻:执行力的短板 认知重塑:明晰学习的本…...

2024年12月CCF-GESP编程能力等级认证Python编程三级真题解析
本文收录于专栏《Python等级认证CCF-GESP真题解析》,专栏总目录:点这里,订阅后可阅读专栏内所有文章。 一、单选题(每题 2 分,共 30 分) 第 1 题 2024年10月8日,诺贝尔物理学奖“意外地”颁给了两位计算机科学家约翰霍普菲尔德(John J. Hopfield)和杰弗里辛顿(Geof…...

.NET Core 中使用 C# 获取Windows 和 Linux 环境兼容路径合并
在 .NET Core 中使用 C# 处理路径合并并确保在 Windows 和 Linux 环境中都能正常工作,可以使用 System.IO.Path 和 System.IO.Path.Combine 方法。它们是跨平台的,能够根据操作系统自动处理路径分隔符。可以通过 System.Runtime.InteropServices.Runtime…...
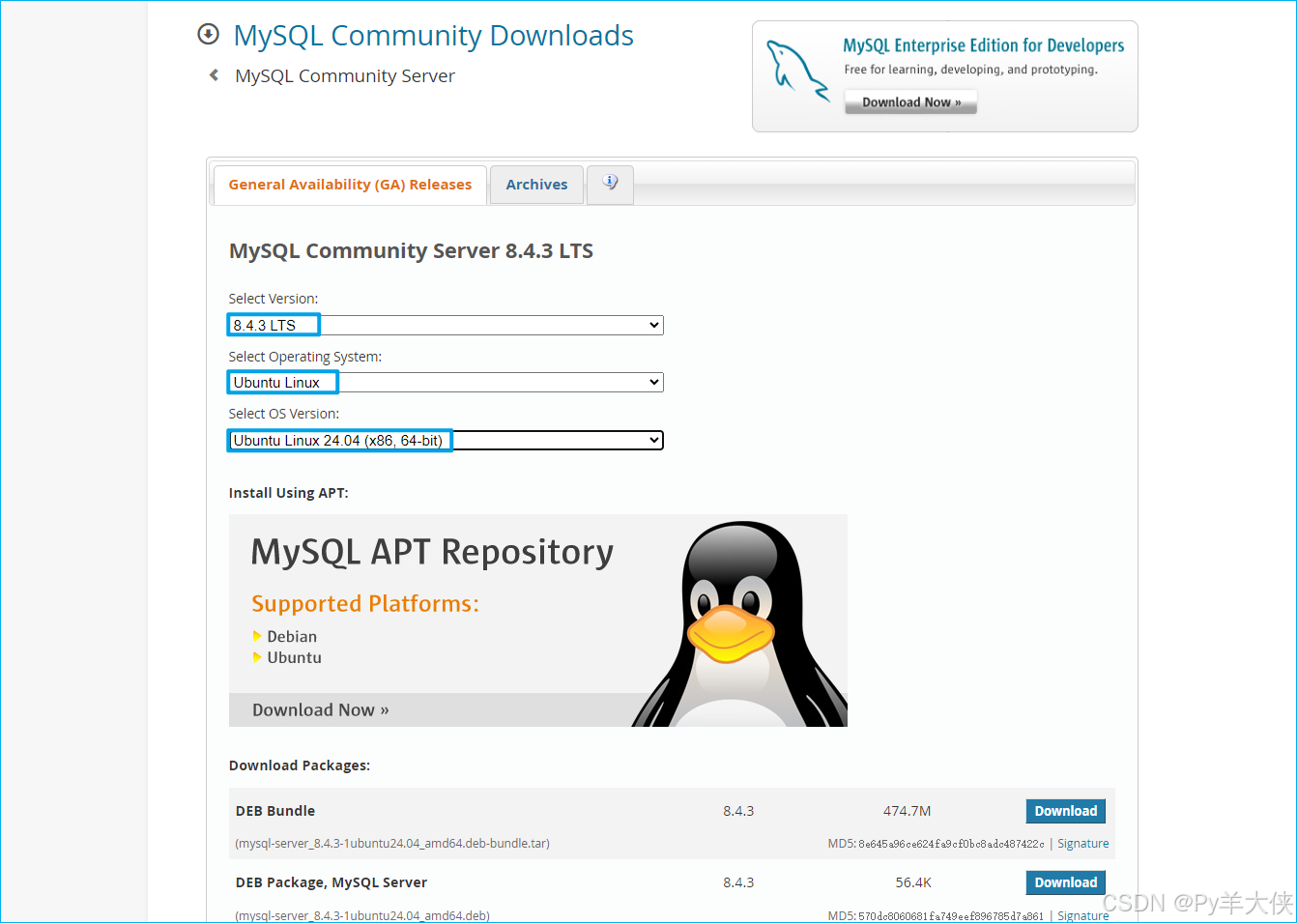
【SH】Ubuntu Server 24服务器搭建MySQL数据库研发笔记
文章目录 搭建服务器在线安装1. 更新软件包列表2. 安装MySQL3. 检查MySQL状态4. 修改密码5. 新增用户6. 设置局域网访问 离线安装下载安装包 常用命令参考文档在线安装日志 搭建服务器 作者羊大侠搭建的是 Ubuntu Server 24.04 LTS 服务器环境 搭建参考文档:【SH】…...
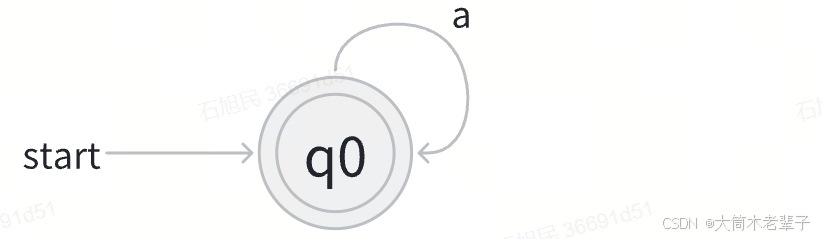
编译原理复习---正则表达式+有穷自动机
适用于电子科技大学编译原理期末考试复习。 1. 正则表达式 正则表达式(Regular Expression,简称regex或regexp)是一种用于描述、匹配和操作文本模式的强大工具。它由一系列字符和特殊符号组成,这些字符和符号定义了一种搜索模式…...
知识图谱+RAG学习
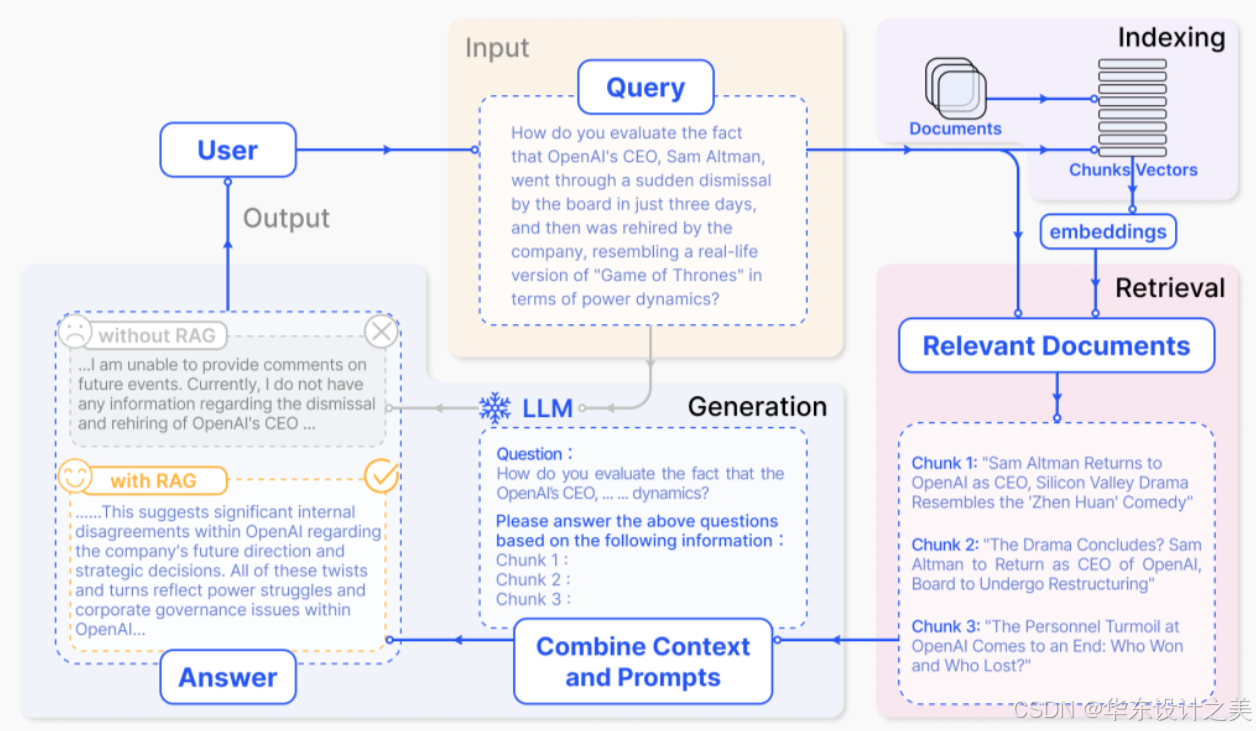
GraphRAG(Graph-based Retrieval-Augmented Generation)是微软在2024年推出的一项开源技术,旨在通过结合知识图谱和检索增强生成(RAG)方法,为大型语言模型(LLM)的数据处理提供全新解…...
消息队列技术的发展历史
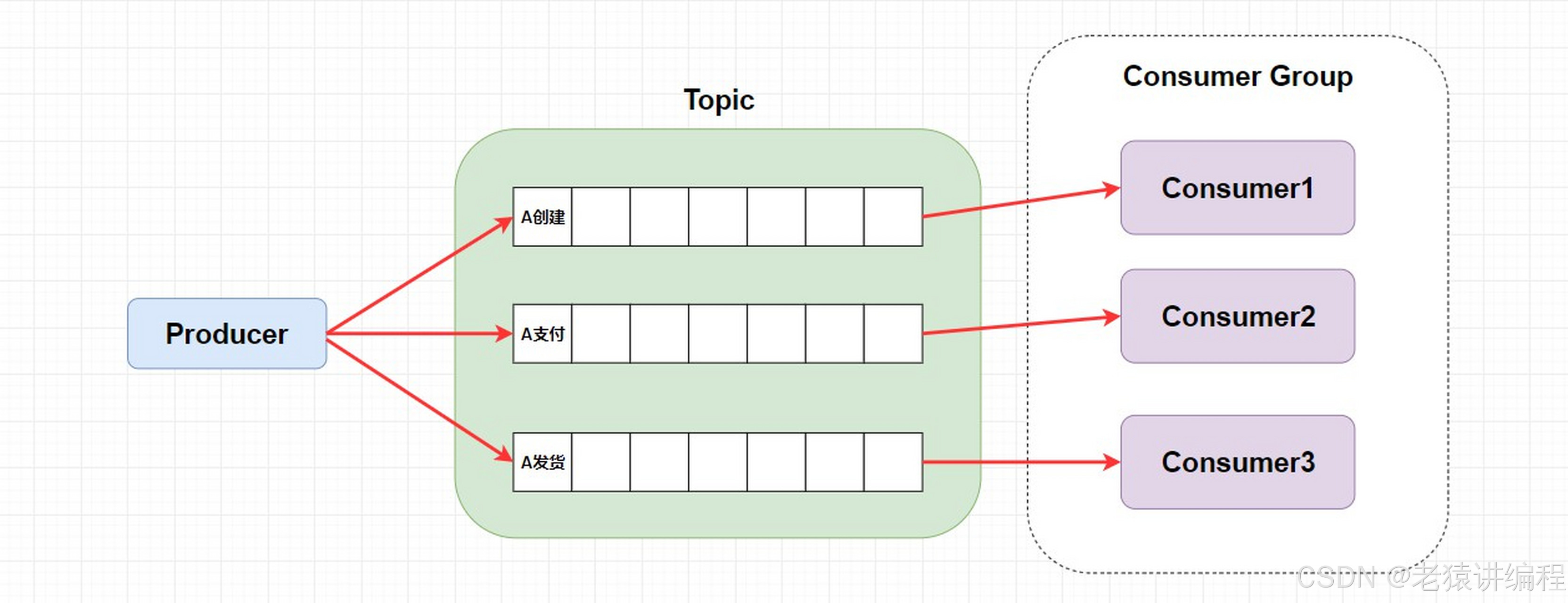
消息队列技术的演进历程宛如一幅波澜壮阔的科技画卷,历经多个标志性阶段,各阶段紧密贴合不同的技术需求与市场风向,下面为您详细道来。 第一阶段:消息中间件的起源(1970 年代末期 - 1980 年代中期) 在计算…...
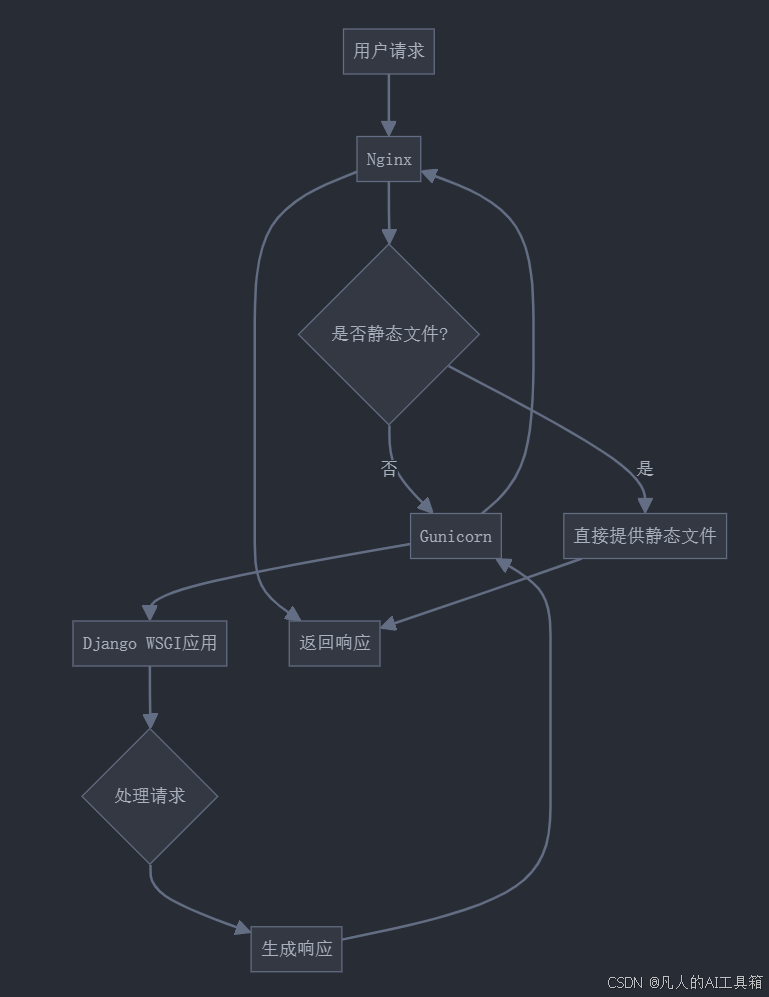
每天40分玩转Django:Django部署
Django部署 一、今日学习内容概述 学习模块重要程度主要内容生产环境配置⭐⭐⭐⭐⭐settings配置、环境变量WSGI服务器⭐⭐⭐⭐⭐Gunicorn配置、性能优化Nginx配置⭐⭐⭐⭐反向代理、静态文件安全设置⭐⭐⭐⭐⭐SSL证书、安全选项 二、生产环境配置 2.1 项目结构调整 mypr…...

搭建Elastic search群集
一、实验环境 二、实验步骤 Elasticsearch 是一个分布式、高扩展、高实时的搜索与数据分析引擎Elasticsearch目录文件: /etc/elasticsearch/elasticsearch.yml#配置文件 /etc/elasticsearch/jvm.options#java虚拟机 /etc/init.d/elasticsearch#服务启动脚本 /e…...
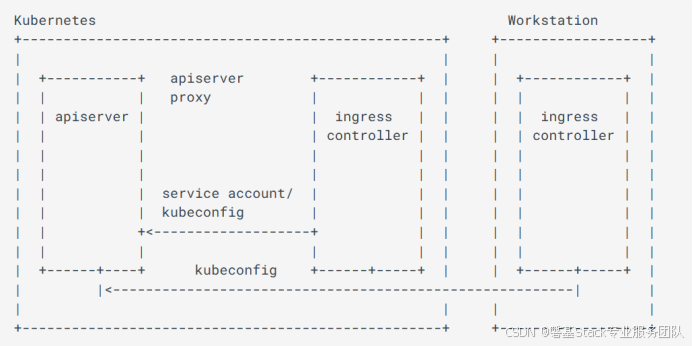
解析 Ingress-Nginx 故障:排查思路与方法
文章目录 一、什么是Ingress-Nginx二、故障排除1.1Ingress-Controller日志和事件检查 Ingress 资源事件检查 Nginx 配置检查使用的服务是否存在调试日志 1.2对 Kubernetes API 服务器的认证服务认证服务账户Kube-Config 1.3使用GDB和Nginx1.4在 Nginx 4.2.5 或其他版本…...

Linux下objdump实战:从二进制文件到可读反汇编的进阶指南
1. 初识objdump:二进制世界的翻译官 第一次接触二进制文件分析时,我盯着hexdump输出的十六进制数字完全摸不着头脑。直到发现了objdump这个神器,它就像一位精通机器语言的翻译官,能把晦涩的二进制代码转换成我们能读懂的汇编指令…...

OpenClaw人人养虾:云服务成本对比
本指南详细对比了在不同云服务商上部署 OpenClaw 的成本,并提供优化建议帮你降低总体开支。服务器配置推荐根据使用规模选择合适的服务器配置:规模配置适用场景并发用户最小可用2C4G 40GB SSD个人使用、体验测试1-3 人推荐配置4C8G 80GB SSD小团队日常使…...

2025届必备的五大AI写作平台解析与推荐
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 于学术写作范畴,AI论文工具正渐渐演变成研究者常用之物,这类工具包含…...

如何永久保存微信聊天记录?三步实现数据自主管理的完整指南
如何永久保存微信聊天记录?三步实现数据自主管理的完整指南 【免费下载链接】WeChatMsg 提取微信聊天记录,将其导出成HTML、Word、CSV文档永久保存,对聊天记录进行分析生成年度聊天报告 项目地址: https://gitcode.com/GitHub_Trending/we/…...

【CTF】【二进制分析】深入解析JPG文件结构:从段标识到霍夫曼编码
1. JPG文件结构基础:二进制视角下的图片解剖 第一次用WinHex打开JPG文件时,满屏的十六进制代码可能会让你头皮发麻。但别担心,这些看似杂乱的数据其实遵循着严格的规范。就像拆解乐高积木,只要找到关键连接点,整个结构…...

魔兽争霸III兼容性终极指南:让经典游戏在现代系统上完美重生
魔兽争霸III兼容性终极指南:让经典游戏在现代系统上完美重生 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper 还在为魔兽争霸III在Windows …...

5分钟快速上手:智慧树自动刷课插件的终极解决方案
5分钟快速上手:智慧树自动刷课插件的终极解决方案 【免费下载链接】zhihuishu 智慧树刷课插件,自动播放下一集、1.5倍速度、无声 项目地址: https://gitcode.com/gh_mirrors/zh/zhihuishu 还在为智慧树平台繁琐的网课学习而烦恼吗?智慧…...

Qwen-Ranker Pro效果展示:跨境电商评论情感倾向与产品特征语义对齐
Qwen-Ranker Pro效果展示:跨境电商评论情感倾向与产品特征语义对齐 1. 为什么电商搜索总“猜不中”用户真实意图? 你有没有遇到过这样的情况:在跨境电商平台搜索“轻便防水登山鞋”,结果首页却出现一堆厚重的军靴、带金属扣的工…...

Python:深入理解set_seed——确保机器学习实验的可重复性
1. 为什么我们需要set_seed? 做机器学习实验时,最让人头疼的就是结果不可复现。昨天跑出来的准确率是92%,今天同样的代码跑出来变成了89%。这种"薛定谔的准确率"让很多开发者抓狂。我在实际项目中就遇到过这种情况:在调…...

代码随想录一刷记录Day25——leetcode491.递增子序列
前言 之前就有刷代码随想录,但奈何总是三天打鱼两天晒网,而且刷的也很囫囵吞枣,于是乎决定参加代码随想录训练营,准备精刷一遍,希望自己能坚持下去,结营后自己的算法水平能更上一个level,冲ing…...