随手笔记——3D−3D:ICP求解
随手笔记——3D−3D:ICP求解
- 使用 SVD 求解 ICP
- 使用非线性优化来求解 ICP
原理参见 https://blog.csdn.net/jppdss/article/details/131919483
使用 SVD 求解 ICP
使用两幅 RGB-D 图像,通过特征匹配获取两组 3D 点,最后用 ICP 计算它们的位姿变换。
void pose_estimation_3d3d(const vector<Point3f> &pts1,const vector<Point3f> &pts2,Mat &R, Mat &t) {Point3f p1, p2; // center of massint N = pts1.size();for (int i = 0; i < N; i++) {p1 += pts1[i];p2 += pts2[i];}p1 = Point3f(Vec3f(p1) / N);p2 = Point3f(Vec3f(p2) / N);vector<Point3f> q1(N), q2(N); // remove the centerfor (int i = 0; i < N; i++) {q1[i] = pts1[i] - p1;q2[i] = pts2[i] - p2;}// compute q1*q2^TEigen::Matrix3d W = Eigen::Matrix3d::Zero();for (int i = 0; i < N; i++) {W += Eigen::Vector3d(q1[i].x, q1[i].y, q1[i].z) * Eigen::Vector3d(q2[i].x, q2[i].y, q2[i].z).transpose();}cout << "W=" << W << endl;// SVD on WEigen::JacobiSVD<Eigen::Matrix3d> svd(W, Eigen::ComputeFullU | Eigen::ComputeFullV);Eigen::Matrix3d U = svd.matrixU();Eigen::Matrix3d V = svd.matrixV();cout << "U=" << U << endl;cout << "V=" << V << endl;Eigen::Matrix3d R_ = U * (V.transpose());if (R_.determinant() < 0) {R_ = -R_;}Eigen::Vector3d t_ = Eigen::Vector3d(p1.x, p1.y, p1.z) - R_ * Eigen::Vector3d(p2.x, p2.y, p2.z);// convert to cv::MatR = (Mat_<double>(3, 3) <<R_(0, 0), R_(0, 1), R_(0, 2),R_(1, 0), R_(1, 1), R_(1, 2),R_(2, 0), R_(2, 1), R_(2, 2));t = (Mat_<double>(3, 1) << t_(0, 0), t_(1, 0), t_(2, 0));
}
使用非线性优化来求解 ICP
使用两幅 RGB-D 图像,通过特征匹配获取两组 3D 点,最后用非线性优化计算它们的位姿变换。
/// vertex and edges used in g2o ba
class VertexPose : public g2o::BaseVertex<6, Sophus::SE3d> {
public:EIGEN_MAKE_ALIGNED_OPERATOR_NEW;virtual void setToOriginImpl() override {_estimate = Sophus::SE3d();}/// left multiplication on SE3virtual void oplusImpl(const double *update) override {Eigen::Matrix<double, 6, 1> update_eigen;update_eigen << update[0], update[1], update[2], update[3], update[4], update[5];_estimate = Sophus::SE3d::exp(update_eigen) * _estimate;}virtual bool read(istream &in) override {}virtual bool write(ostream &out) const override {}
};/// g2o edge
class EdgeProjectXYZRGBDPoseOnly : public g2o::BaseUnaryEdge<3, Eigen::Vector3d, VertexPose> {
public:EIGEN_MAKE_ALIGNED_OPERATOR_NEW;EdgeProjectXYZRGBDPoseOnly(const Eigen::Vector3d &point) : _point(point) {}virtual void computeError() override {const VertexPose *pose = static_cast<const VertexPose *> ( _vertices[0] );_error = _measurement - pose->estimate() * _point;}virtual void linearizeOplus() override {VertexPose *pose = static_cast<VertexPose *>(_vertices[0]);Sophus::SE3d T = pose->estimate();Eigen::Vector3d xyz_trans = T * _point;_jacobianOplusXi.block<3, 3>(0, 0) = -Eigen::Matrix3d::Identity();_jacobianOplusXi.block<3, 3>(0, 3) = Sophus::SO3d::hat(xyz_trans);}bool read(istream &in) {}bool write(ostream &out) const {}protected:Eigen::Vector3d _point;
};void bundleAdjustment(const vector<Point3f> &pts1,const vector<Point3f> &pts2,Mat &R, Mat &t) {// 构建图优化,先设定g2otypedef g2o::BlockSolverX BlockSolverType;typedef g2o::LinearSolverDense<BlockSolverType::PoseMatrixType> LinearSolverType; // 线性求解器类型// 梯度下降方法,可以从GN, LM, DogLeg 中选auto solver = new g2o::OptimizationAlgorithmLevenberg(g2o::make_unique<BlockSolverType>(g2o::make_unique<LinearSolverType>()));g2o::SparseOptimizer optimizer; // 图模型optimizer.setAlgorithm(solver); // 设置求解器optimizer.setVerbose(true); // 打开调试输出// vertexVertexPose *pose = new VertexPose(); // camera posepose->setId(0);pose->setEstimate(Sophus::SE3d());optimizer.addVertex(pose);// edgesfor (size_t i = 0; i < pts1.size(); i++) {EdgeProjectXYZRGBDPoseOnly *edge = new EdgeProjectXYZRGBDPoseOnly(Eigen::Vector3d(pts2[i].x, pts2[i].y, pts2[i].z));edge->setVertex(0, pose);edge->setMeasurement(Eigen::Vector3d(pts1[i].x, pts1[i].y, pts1[i].z));edge->setInformation(Eigen::Matrix3d::Identity());optimizer.addEdge(edge);}chrono::steady_clock::time_point t1 = chrono::steady_clock::now();optimizer.initializeOptimization();optimizer.optimize(10);chrono::steady_clock::time_point t2 = chrono::steady_clock::now();chrono::duration<double> time_used = chrono::duration_cast<chrono::duration<double>>(t2 - t1);cout << "optimization costs time: " << time_used.count() << " seconds." << endl;cout << endl << "after optimization:" << endl;cout << "T=\n" << pose->estimate().matrix() << endl;// convert to cv::MatEigen::Matrix3d R_ = pose->estimate().rotationMatrix();Eigen::Vector3d t_ = pose->estimate().translation();R = (Mat_<double>(3, 3) <<R_(0, 0), R_(0, 1), R_(0, 2),R_(1, 0), R_(1, 1), R_(1, 2),R_(2, 0), R_(2, 1), R_(2, 2));t = (Mat_<double>(3, 1) << t_(0, 0), t_(1, 0), t_(2, 0));
}
注:以上仅供个人学习使用,如有侵权,请联系!
相关文章:

随手笔记——3D−3D:ICP求解
随手笔记——3D−3D:ICP求解 使用 SVD 求解 ICP使用非线性优化来求解 ICP 原理参见 https://blog.csdn.net/jppdss/article/details/131919483 使用 SVD 求解 ICP 使用两幅 RGB-D 图像,通过特征匹配获取两组 3D 点,最后用 ICP 计算它们的位…...

Python调用各大机器翻译API大全
过去的二三年中,我一直关注的是机器翻译API在自动化翻译过程中的应用,包括采用CAT工具和Python编程语言来调用机器翻译API,然后再进行译后编辑,从而达到快速翻译的目的。 然而,我发现随着人工智能的发展,很…...
重生之我要学C++第六天
这篇文章的主要内容是const以及权限问题、static关键字、友元函数和友元类,希望对大家有所帮助,点赞收藏评论支持一下吧! 更多优质内容跳转: 专栏:重生之C启程(文章平均质量分93) 目录 const以及权限问题 1.const修饰…...

SpringBoot中ErrorPage(错误页面)的使用--【ErrorPage组件】
SpringBoot系列文章目录 SpringBoot知识范围-学习步骤–【思维导图知识范围】 文章目录 SpringBoot系列文章目录本系列校训 SpringBoot技术很多很多环境及工具:必要的知识深层一些的知识 上效果图在Spring Boot里使用ErrorPage还要注意的是 配套资源作业ÿ…...

【Android】APP网络优化学习笔记
网络优化原因 进行网络优化对于移动应用程序而言非常重要,原因如下: 用户体验: 网络连接是移动应用程序的核心功能之一。通过进行网络优化,可以提高应用的加载速度和响应速度,减少用户等待时间,提供更流…...
简单的知识图谱可视化+绘制nx.Graph()时报错TypeError: ‘_AxesStack‘ object is not callable
绘制nx.Graph时报错TypeError: _AxesStack object is not callable 写在最前面知识图谱可视化预期报错可能的原因 原代码原因确认解决后的代码解决! 写在最前面 实现一个简单的知识图谱的可视化功能。 使用了NetworkX库来构建知识图谱,并使用matplotlib…...
)
【Matlab】基于粒子群优化算法优化BP神经网络的时间序列预测(Excel可直接替换数据)
【Matlab】基于粒子群优化算法优化BP神经网络的时间序列预测(Excel可直接替换数据) 1.模型原理2.数学公式3.文件结构4.Excel数据5.分块代码5.1 fun.m5.2 main.m6.完整代码6.1 fun.m6.2 main.m7.运行结果1.模型原理 基于粒子群优化算法(Particle Swarm Optimization, PSO)优…...
【机器学习】Cost Function for Logistic Regression
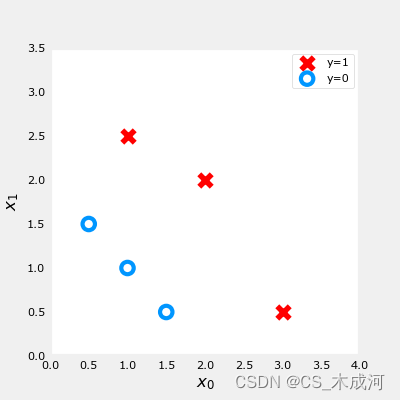
Cost Function for Logistic Regression 1. 平方差能否用于逻辑回归?2. 逻辑损失函数loss3. 损失函数cost附录 导入所需的库 import numpy as np %matplotlib widget import matplotlib.pyplot as plt from plt_logistic_loss import plt_logistic_cost, plt_two_…...

【EI/SCOPUS会议征稿】2023年第四届新能源与电气科技国际学术研讨会 (ISNEET 2023)
作为全球科技创新大趋势的引领者,中国一直在为科技创新创造越来越开放的环境,提高学术合作的深度和广度,构建惠及全民的创新共同体。这些努力为全球化和创建共享未来的共同体做出了新的贡献。 为交流近年来国内外在新能源和电气技术领域的最新…...
【计算机网络】10、ethtool
文章目录 一、ethtool1.1 常见操作1.1.1 展示设备属性1.1.2 改变网卡属性1.1.2.1 Auto-negotiation1.1.2.2 Speed 1.1.3 展示网卡驱动设置1.1.4 只展示 Auto-negotiation, RX and TX1.1.5 展示统计1.1.7 排除网络故障1.1.8 通过网口的 LED 区分网卡1.1.9 持久化配置(…...

什么是前端工程化?
工程化介绍 什么是前端工程化? 前端工程化是一种思想,而不是某种技术。主要目的是为了提高效率和降低成本,也就是说在开发的过程中可以提高开发效率,减少不必要的重复性工作等。 tip 现实生活举例 建房子谁不会呢?请…...

【深度学习】【三维重建】windows11环境配置tiny-cuda-nn详细教程
【深度学习】【三维重建】windows11环境配置tiny-cuda-nn详细教程 文章目录 【深度学习】【三维重建】windows11环境配置tiny-cuda-nn详细教程前言确定版本对应关系源码编译安装tiny-cuda-nn总结 前言 本人windows11下使用【Instant Neural Surface Reconstruction】算法时需要…...

Matlab 一种自适应搜索半径的特征提取方法
文章目录 一、简介二、实现代码参考资料一、简介 在之前的博客(C++ ID3决策树)中,提到过一种信息熵的概念,其中它表达的大致意思为:香农认为熵是指“当一件事情有多种可能情况时,这件事情发生某种情况的不确定性”,也就是指如果一个事情的不确定性越大,那么这个信息的熵…...
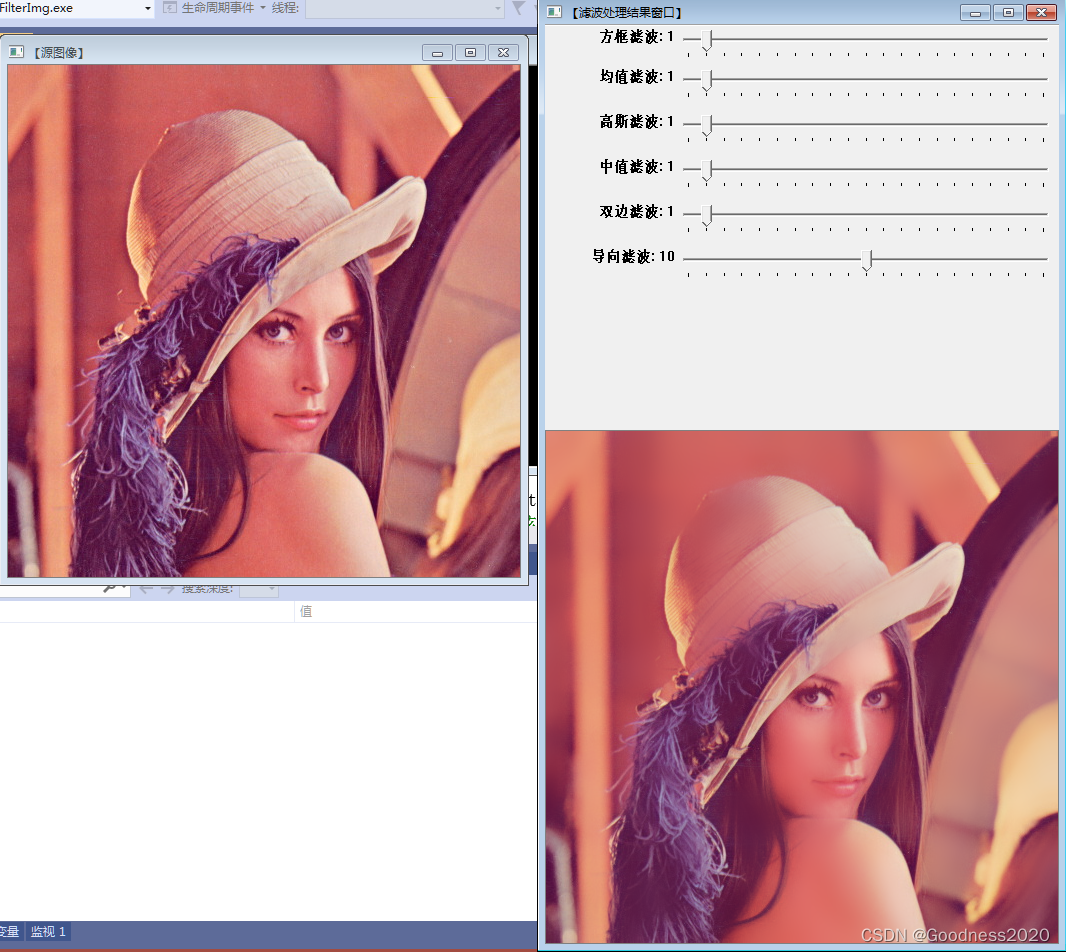
基于opencv的几种图像滤波
一、介绍 盒式滤波、均值滤波、高斯滤波、中值滤波、双边滤波、导向滤波。 boxFilter() blur() GaussianBlur() medianBlur() bilateralFilter() 二、代码 #include <opencv2/core/core.hpp> #include <opencv2/highgui/highgui.hpp> …...
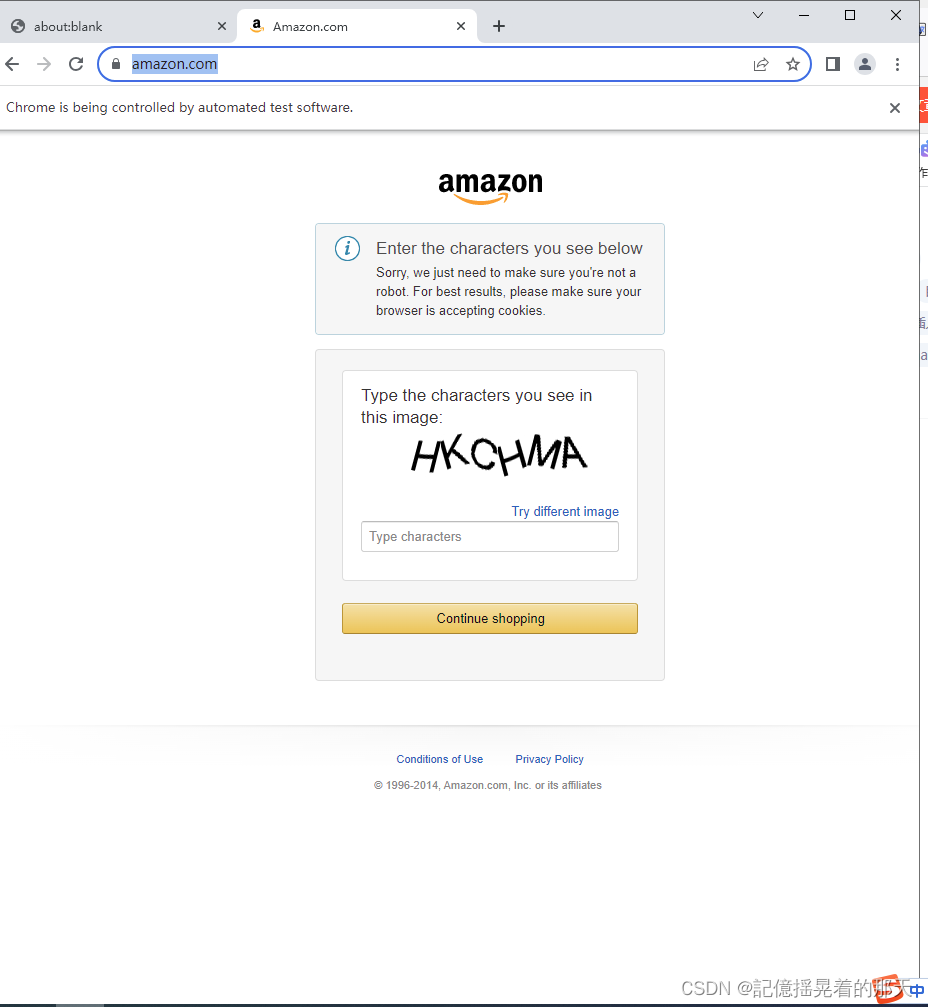
puppeteer代理的搭建和配置
puppeteer代理的搭建和配置 本文深入探讨了Puppeteer在网络爬虫和自动化测试中的重要角色,着重介绍了如何搭建和配置代理服务器,以优化Puppeteer的功能和性能。文章首先介绍了Puppeteer作为一个强大的Headless浏览器自动化工具的优势和应用场景…...
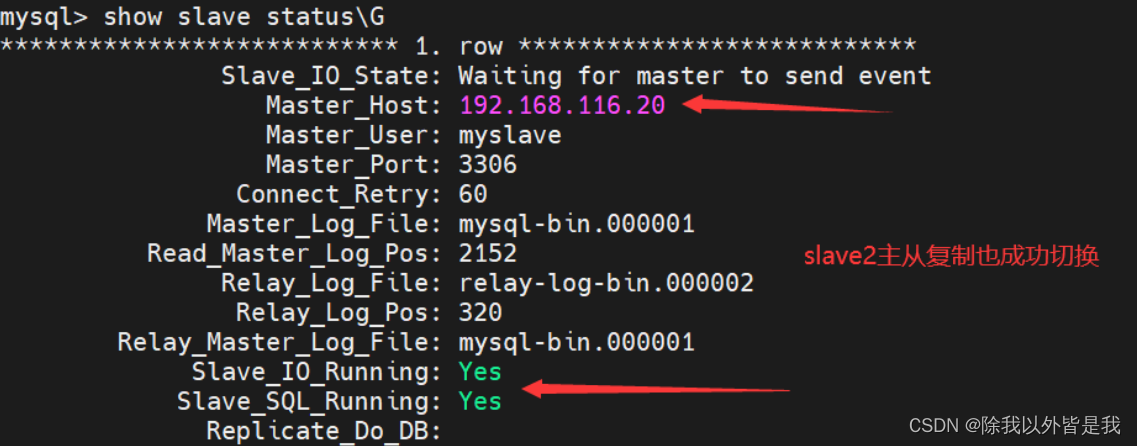
【简单认识MySQL的MHA高可用配置】
文章目录 一、简介1、概述2、MHA 的组成3.MHA 的特点4、MHA工作原理 二、搭建MHA高可用数据库群集1.主从复制2.MHA配置 三、故障模拟四、故障修复步骤: 一、简介 1、概述 MHA(Master High Availability)是一套优秀的MySQL高可用…...
【云原生】一文学会Docker存储所有特性
目录 1.Volumes 1.Volumes使用场景 2.持久将资源存放 3. 只读挂载 2.Bind mount Bind mounts使用场景 3.tmpfs mounts使用场景 4.Bind mounts和Volumes行为上的差异 5.docker file将存储内置到镜像中 6.volumes管理 1.查看存储卷 2.删除存储卷 3.查看存储卷的详细信息…...
Android Ble蓝牙App(一)扫描
Ble蓝牙App(一)扫描 前言正文一、基本配置二、扫描准备三、扫描页面① 增加UI布局② 点击监听③ 扫描处理④ 广播处理 四、权限处理五、扫描结果① 列表适配器② 扫描结果处理③ 接收结果 六、源码 前言 关于低功耗的蓝牙介绍我已经做过很多了࿰…...
mac pd安装ubuntu并配置远程连接
背景 一个安静的下午,我又想去折腾点什么了。准备学习一下k8s的,但是没有服务器。把我给折腾的,在抱怨了:为什么M系列芯片的资源怎么这么少。 好在伙伴说,你可以尝试一下ubantu。于是,我只好在我的mac上安…...
1.3 eureka+ribbon,完成服务注册与调用,负载均衡源码追踪
本篇继先前发布的1.2 eureka注册中心,完成服务注册的内容。 目录 环境搭建 采用eurekaribbon的方式,对多个user服务发送请求,并实现负载均衡 负载均衡原理 负载均衡源码追踪 负载均衡策略 如何选择负载均衡策略? 饥饿加载…...

G-Helper终极指南:免费轻量级华硕笔记本控制中心完全解决方案
G-Helper终极指南:免费轻量级华硕笔记本控制中心完全解决方案 【免费下载链接】g-helper Lightweight Armoury Crate alternative for Asus laptops with nearly the same functionality. Works with ROG Zephyrus, Flow, TUF, Strix, Scar, ProArt, Vivobook, Zenb…...

STM32 SysTick中断:嵌入式系统时间管理的核心原理与实战应用
1. 项目概述:为什么SysTick中断是STM32开发的基石在STM32的嵌入式开发世界里,无论你是刚入门的新手,还是已经做过几个项目的熟手,有一个功能你几乎无法绕开,那就是SysTick——系统滴答定时器。你可能在HAL库的初始化代…...

记录人生第一个Linux内核Patch被采纳的经历
最近运气不错,提交的一个关于 Linux 内核 SMMUv3 驱动的补丁(Patch)被采纳了。虽然只是一个边界条件的微调,但作为自己的第一个 Patch,过程还挺有意思的,中间也暴露出自己不少技术盲区。趁着记忆热乎&#…...

1分钟带你认识分辨率 帧率, 码率 HDR 的作用
日常刷视频,刷到关于剪辑的只是,就会老是听到一些分辨率,帧率 码率 HDR 这个名字,那你一定很好奇,这些是什么,有什么作用,今天小编就用最简单直白的话,一分钟带你搞懂四大核心参数的…...

历年各批次“重点小巨人”企业全面分析报告
国家级重点专精特新“小巨人”企业是专注于细分市场、创新能力强、市场占有率高、掌握关键核心技术、质量效益优的“排头兵”企业。自政策实施以来,重点“小巨人”已逐步成为我国培育新质生产力、推进新型工业化、提升产业链供应链韧性与安全水平的核心抓手。从工业…...

Kirikiri游戏开发终极指南:开源工具集完整解决方案
Kirikiri游戏开发终极指南:开源工具集完整解决方案 【免费下载链接】KirikiriTools Tools for the Kirikiri visual novel engine 项目地址: https://gitcode.com/gh_mirrors/ki/KirikiriTools KirikiriTools是专为Kirikiri视觉小说游戏引擎设计的开源工具集…...

CANN/pypto循环结束判断API
pypto.is_loop_end 【免费下载链接】pypto PyPTO(发音: pai p-t-o):Parallel Tensor/Tile Operation编程范式。 项目地址: https://gitcode.com/cann/pypto 产品支持情况 产品是否支持Atlas A3 训练系列产品/Atlas A3 推理系列产品√…...

Unity风格化木质道具包:模块化建模与多管线材质优化方案
1. 这个木质道具包到底解决了什么实际问题?在Unity项目开发中,尤其是独立游戏、原型验证或教育类场景里,“缺模型”是高频痛点。不是所有团队都有建模师,也不是每个项目都值得为几十个木头物件专门外包或花两周时间从零建模。我做…...

解锁包豪斯极简美学:Midjourney V6中实现100%可控几何构成的3步提示工程法
更多请点击: https://intelliparadigm.com 第一章:包豪斯极简美学与Midjourney V6的范式耦合 包豪斯学派所倡导的“形式追随功能”“少即是多”“去除冗余装饰”等核心信条,正以惊人的契合度映射于Midjourney V6的底层生成逻辑——其增强的语…...

HBase 分布式集群部署实战:从解压到启动的完整指南
HBase 分布式集群部署实战:从解压到启动的完整指南 文章目录HBase 分布式集群部署实战:从解压到启动的完整指南步骤一:解压安装文件步骤二:配置环境变量步骤三:修改配置文件(master节点)步骤四&…...