罗技鼠标使用接收器和电脑重新配对
罗技鼠标使用接收器和电脑重新配对
文章目录
- 罗技鼠标使用接收器和电脑重新配对
- 1\. 前言
- 2\. 安装软件
- 3\. 进行配对
- 3.1. 取消之前的配对
- 3.2. 重新配对
- 3.3 配对完成
- 4\. 报错
- 4.1. 重新配对时显示配对未成功
1. 前言
- 罗技的鼠标出厂的时候,默认的是将通道一设置为接收器配对,在后面如果把通道一改为了蓝牙配对,那之前的接收器配对的连接就断开了。如果后面再想改为接手机配对的话,就需要借助罗技官方的软件进行手动配对了
2. 安装软件
- 到这里下载Unifying软件
- support.logi.com/hc/zh cn/articles/360024361233

下载之后直接安装即可
3. 进行配对
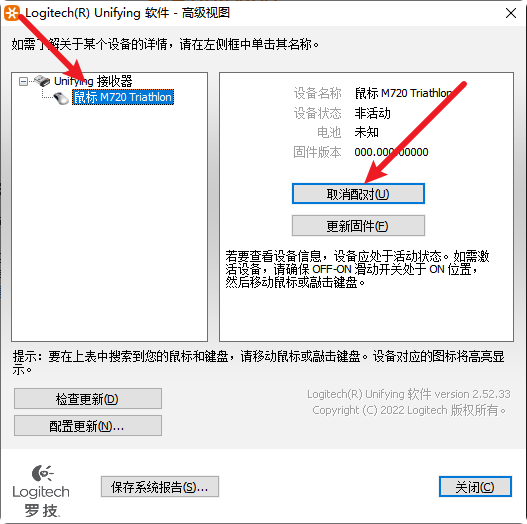
3.1. 取消之前的配对
- 将罗技鼠标接收器插到电脑的USB口上
- 打开软件后,点击高级,

- 这里可以查看到,现在已经建立好的配对,我们取消配对

3.2. 重新配对
- 点击关闭之后,点击下一步

- 关闭罗技鼠标背面的开关
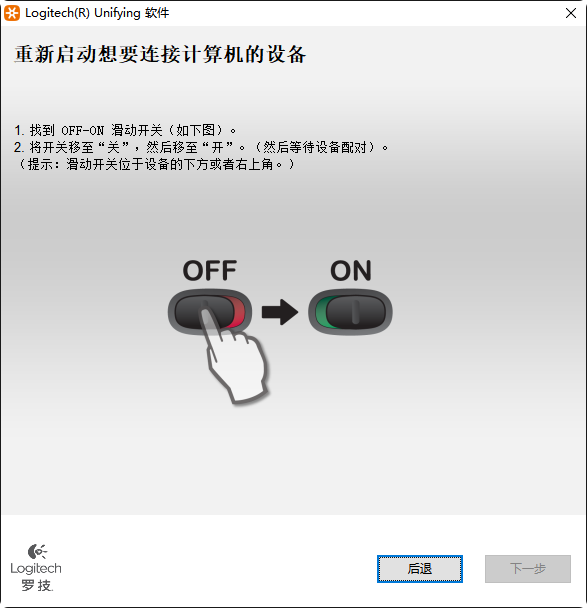

- 之后重新打开这个开关,稍等一会儿就会重新检测到

移动一下罗意鼠标看电脑上的指针是否移动。如果能移动的话,点击是,之后下一步

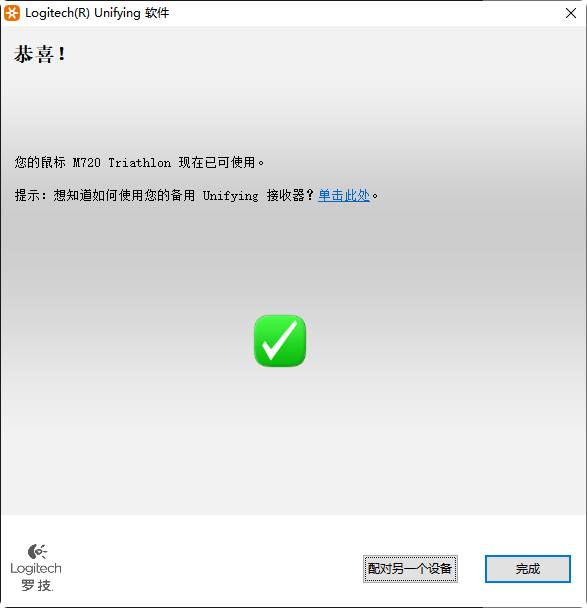
3.3 配对完成
4. 报错
4.1. 重新配对时显示配对未成功

- 有可能是自己关闭鼠标的开关再打开,中间间隔的时间太久了
- 有可能是之前这个通道鼠标和电脑通过蓝牙配对过,需要先在电脑设置中将这个蓝牙配对删除才行
相关文章:
罗技鼠标使用接收器和电脑重新配对
罗技鼠标使用接收器和电脑重新配对 文章目录 罗技鼠标使用接收器和电脑重新配对1\. 前言2\. 安装软件3\. 进行配对3.1. 取消之前的配对3.2. 重新配对3.3 配对完成 4\. 报错4.1. 重新配对时显示配对未成功 1. 前言 罗技的鼠标出厂的时候,默认的是将通道一设置为接收…...
高项备考葵花宝典-项目进度管理输入、输出、工具和技术(下,很详细考试必过)
项目进度管理的目标是使项目按时完成。有效的进度管理是项目管理成功的关键之一,进度问题在项目生命周期内引起的冲突最多。 小型项目中,定义活动、排列活动顺序、估算活动持续时间及制定进度模型形成进度计划等过程的联系非常密切,可以视为一…...

GumbleSoftmax感性理解--可导式输出随机类别
GumbleSoftmax 本文不涉及GumbleSoftmax的具体证明和推导,有需要请参见1,只是从感性角度来直观讲解为何要引入GumbleSoftmax,同时又为什么不用Gumblemax。 GumbleSoftmax提出是为了应对分布采样不可导的问题。举例而言,我们从网络…...
ROS gazebo 机器人仿真,环境与robot建模,添加相机 lidar,控制robot运动
b站上有一个非常好的ros教程234仿真之URDF_link标签简介-机器人系统仿真_哔哩哔哩_bilibili,推荐去看原视频。 视频教程的相关文档见:6.7.1 机器人运动控制以及里程计信息显示 Autolabor-ROS机器人入门课程《ROS理论与实践》零基础教程 本文对视频教程…...
人体关键点检测3:Android实现人体关键点检测(人体姿势估计)含源码 可实时检测
目录 1. 前言 2.人体关键点检测方法 (1)Top-Down(自上而下)方法 (2)Bottom-Up(自下而上)方法: 3.人体关键点检测模型训练 4.人体关键点检测模型Android部署 (1) 将Pytorch模型转换ONNX模型 (2) 将ONNX模型转换…...

踩坑记录:uniapp中scroll-view的scroll-top不生效问题;
情景描述: 最近在uniapp项目中用到scroll-view内置组件,有需求是在页面下拉刷新后,让scroll-view组件区域的显示内容置顶,也就是scroll-view区域的内容恢复不滑动的状态; 补充:下拉刷新操作scroll-view组件…...

YOLOX 学习笔记
文章目录 前言一、YOLOX贡献和改进二、YOLOX架构改进总结 前言 在计算机视觉领域,实时对象检测技术一直是一个热门的研究话题。YOLO(You Only Look Once)系列作为其中的佼佼者,以其高效的检测速度和准确性,广泛应用于…...

第3节:Vue3 v-bind指令
实例: <template><div><button v-bind:disabled"isButtonDisabled">点击我</button></div> </template><script> import { ref } from vue;export default {setup() {const isButtonDisabled ref(false);ret…...

Token 和 N-Gram、Bag-of-Words 模型释义
ChatGPT(GPT-3.5)和其他大型语言模型(Pi、Claude、Bard 等)凭何火爆全球?这些语言模型的运作原理是什么?为什么它们在所训练的任务上表现如此出色? 虽然没有人可以给出完整的答案,但…...

【go语言实践】基础篇 - 流程控制
if语句 go里面if不需要括号将条件表达式包含起来,这与python也有点类似 if 条件表达式 { } if num > 18 {// ... } else if num > 20 {// ... } else {// ... }需要注意的是go支持在if的条件表达式中直接定义一个变量,变量的作用域只在if范围内…...
Linux:gdb的简单使用
个人主页 : 个人主页 个人专栏 : 《数据结构》 《C语言》《C》《Linux》 文章目录 前言一、前置理解二、使用总结 前言 gdb是Linux中的调试代码的工具 一、前置理解 我们都知道要调试一份代码,这份代码的发布模式必须是debug。那你知道在li…...

NestJS的微服务实现
1.1 基本概念 微服务基本概念:微服务就是将一个项目拆分成多个服务。举个简单的例子:将网站的登录功能可以拆分出来做成一个服务。 微服务分为提供者和消费者,如上“登录服务”就是一个服务提供者,“网站服务器”就是一个服务消…...

Debian 终端Shell命令行长路径改为短路径
需要修改bashrc ~/.bashrc先备份一份 cp .bashrc bashrc.backup编辑bashrc vim ~/.bashrc可以看到bashrc内容为 # ~/.bashrc: executed by bash(1) for non-login shells. # see /usr/share/doc/bash/examples/startup-files (in the package bash-doc) # for examples# If…...

Ansible变量是什么?如何实现任务的循环?
Ansible 利用变量存储整个 Ansible 项目文件中可重复使用的值,从而可以简化项目的创建和维护,并减少错误的发生率。在定义Ansible变量时,通常有如下三种范围的变量: global范围:从命令行或Ansible配置中设置的变量&am…...

随机梯度下降的代码实现
在单变量线性回归的机器学习代码中,我们讨论了批量梯度下降代码的实现,本篇将进行随机梯度下降的代码实现,整体和批量梯度下降代码类似,仅梯度下降部分不同: import numpy as np import pandas as pd import matplotl…...
渐进推导中常用的一些结论
标题很帅 STAR-RIS Enhanced Joint Physical Layer Security and Covert Communications for Multi-antenna mmWave Systems文章末尾的一个推导。 lim M → ∞ ∥ Φ ( w k ⊗ Θ r ) Ω r w H g ∗ ∥ 2 2 M lim M → ∞ Tr ( g T Ω r w ( w k ⊗ Θ r ) H Φ H Φ…...
网络安全等级保护V2.0测评指标
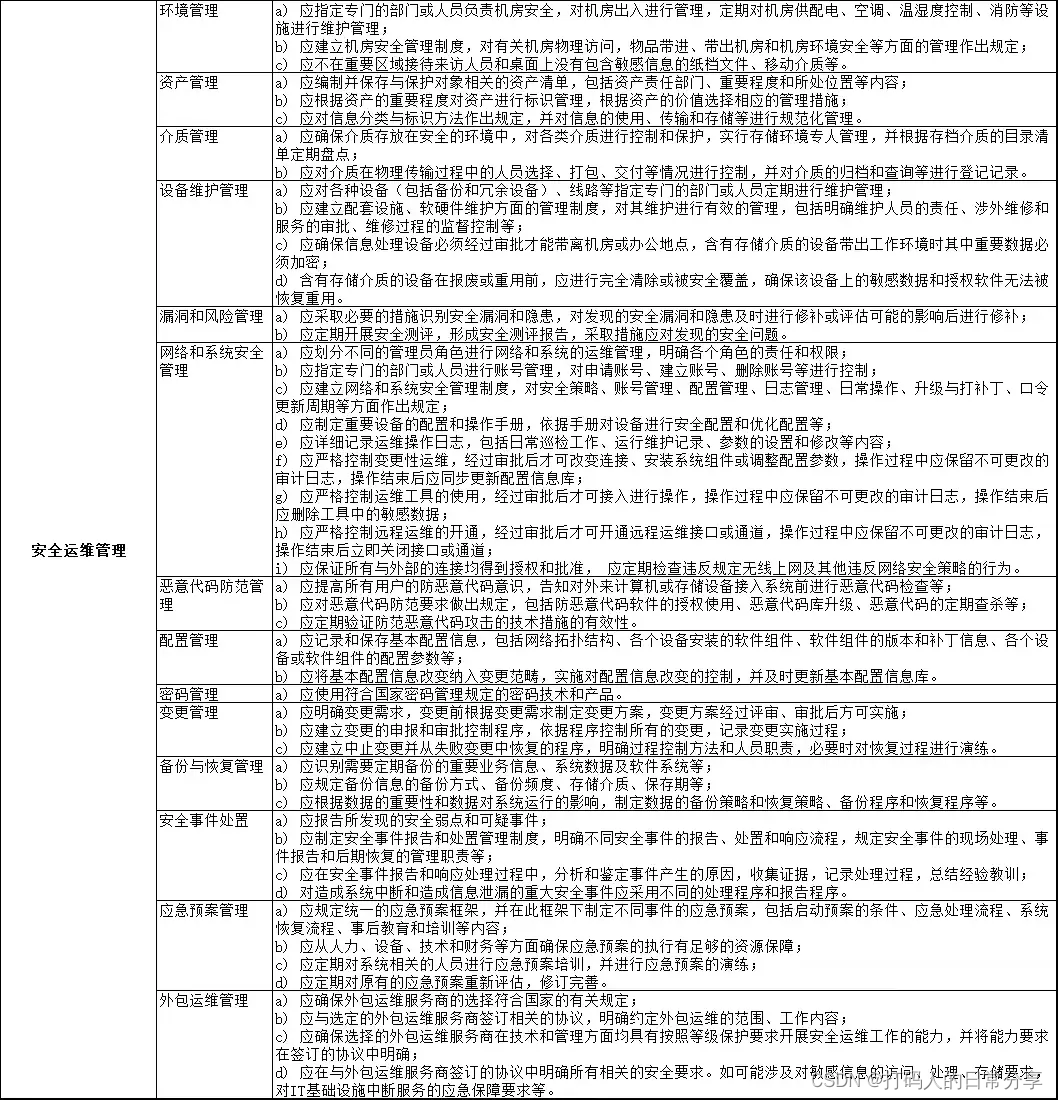
网络安全等级保护(等保V2.0)测评指标: 1、物理和环境安全 2、网络和通信安全 3、设备和计算安全 4、应用和数据安全 5、安全策略和管理制度 6、安全管理机构和人员 7、安全建设管理 8、安全运维管理 软件全文档获取:点我获取 1、物…...

java中list的addAll用法详细实例?
List 的 addAll() 方法用于将一个集合中的所有元素添加到另一个 List 中。下面是一个详细的实例,展示了 addAll() 方法的使用: java Copy code import java.util.ArrayList; import java.util.List; public class AddAllExample { public static v…...

关于学习计算机的心得与体会
也是隔了一周没有发文了,最近一直在准备期末考试,后来想了很久,学了这么久的计算机,这当中有些收获和失去想和各位正在和我一样在学习计算机的路上的老铁分享一下,希望可以作为你们碰到困难时的良药。先叠个甲…...
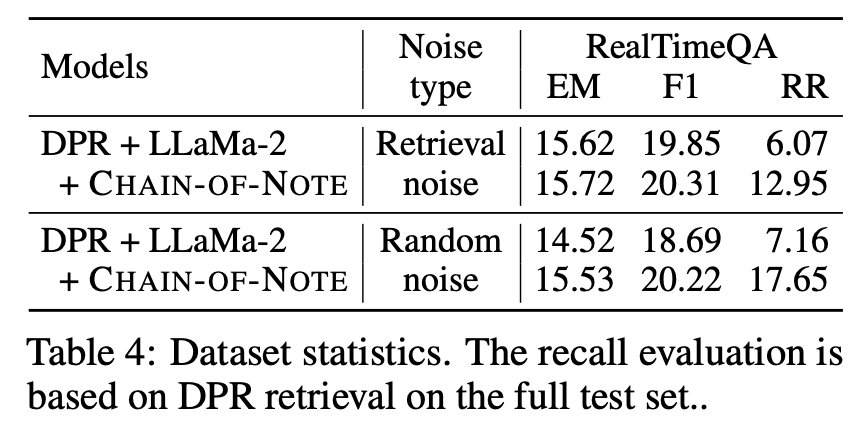
LLM之RAG理论(一)| CoN:腾讯提出笔记链(CHAIN-OF-NOTE)来提高检索增强模型(RAG)的透明度
论文地址:https://arxiv.org/pdf/2311.09210.pdf 检索增强语言模型(RALM)已成为自然语言处理中一种强大的新范式。通过将大型预训练语言模型与外部知识检索相结合,RALM可以减少事实错误和幻觉,同时注入最新知识。然而&…...

RimSort终极指南:开源跨平台RimWorld模组管理器完全解析
RimSort终极指南:开源跨平台RimWorld模组管理器完全解析 【免费下载链接】RimSort RimSort is an open source mod manager for the video game RimWorld. There is support for Linux, Mac, and Windows, built from the ground up to be a reliable, community-ma…...

ComfyUI-Impact-Pack V8架构演进:模块化设计与智能内存管理突破
ComfyUI-Impact-Pack V8架构演进:模块化设计与智能内存管理突破 【免费下载链接】ComfyUI-Impact-Pack Custom nodes pack for ComfyUI This custom node helps to conveniently enhance images through Detector, Detailer, Upscaler, Pipe, and more. 项目地址:…...

AMD Ryzen嵌入式COM Express模块:工业边缘计算的高性能解决方案
1. 项目概述:当工业计算遇上“锐龙”芯在工业自动化、边缘计算和高端嵌入式领域,COM Express(Computer-On-Module Express)模块一直是构建紧凑、高性能、高可靠性系统的基石。它就像一台浓缩的、标准化的“电脑主板核心”…...

SPI接口技术解析与Keil开发实践指南
1. SPI接口技术解析与应用指南作为一名嵌入式开发工程师,我经常需要与各种外设进行通信,而SPI(Serial Peripheral Interface)无疑是最常用的串行通信协议之一。今天我想分享一些关于SPI接口的实用知识和资源,这些内容来…...

智能汽车人机交互与ADAS系统融合:架构、场景与工程实践
1. 项目概述:当驾驶舱的“大脑”与“眼睛”开始对话“集成人机交互和ADAS系统”——这个标题听起来像是一个纯粹的工程命题,但在我过去十多年的汽车电子开发经历中,我越来越深刻地体会到,这其实是一个关于“人、车、路”三者关系如…...

Source Han Serif CN:免费开源中文字体跨平台完整解决方案终极指南
Source Han Serif CN:免费开源中文字体跨平台完整解决方案终极指南 【免费下载链接】source-han-serif-ttf Source Han Serif TTF 项目地址: https://gitcode.com/gh_mirrors/so/source-han-serif-ttf 还在为中文字体授权费用高、跨平台兼容性差而烦恼吗&…...

Phyphox实验避坑指南:测声速时管长、温度、管口校正那些事儿
Phyphox声速测量实验的进阶精度优化手册 在物理实验教学中,声速测量一直是验证波动理论的基础实践。但当智能手机传感器遇上共振管法,看似简单的实验背后藏着诸多魔鬼细节——管口切割的平整度会引入0.5%的误差,手掌温度能在3分钟内使铝管共振…...

AI赋能泳装设计,今夏爆款如何诞生?
AI赋能泳装设计,今夏爆款如何诞生?随着气温攀升,泳装市场迎来销售旺季。北京先智先行科技有限公司凭借"先知大模型"、“先行AI商学院”、"先知AIGC超级工场"三大旗舰产品,正为泳装行业注入全新活力。传统泳装…...

用C#给PowerMill做个外挂:手把手教你写第一个连接与断开PM的WinForm工具
用C#打造PowerMill效率工具:从零构建自动化控制面板 在CNC编程工程师的日常工作中,PowerMill作为行业领先的CAM软件,其强大的功能背后也隐藏着大量重复性操作。每天数十次的项目打开关闭、连接状态检查、刀具路径查询等机械式点击,…...

AI微型赛车:从车道线检测到PID控制,手把手实现端侧自动驾驶
1. 项目概述:当AI遇见指尖上的速度与激情最近在创客圈和AI应用领域,一个结合了硬件、软件与智能算法的项目正悄然兴起,那就是“AI驱动的自动微型赛车”。这听起来像是科幻电影里的场景,但如今,借助开源硬件和成熟的机器…...