利用 SAM2 模型探测卫星图像中的农田边界
将 Segment Anything Model Version 2 应用于卫星图像以检测和导出农业地区田地边界的分步教程
🌟 简介
手动绘制田地边界是最耗时的任务之一,其准确性取决于绘制者的表现。然而,精确的边界检测在很多领域都有应用。例如,假设您想训练一种机器学习算法,分析卫星图像中的植被指数与农场作物产量之间的关系。您需要的第一个输入是农场的形状文件,这通常需要手动绘制。绘制一个形状文件可能只需要几分钟,但如果您需要为 1000 个农场绘制边界呢?这时,这个过程就变得非常耗时,而自动提取边界的技术就变得非常有价值,可以节省数小时的工作时间。
在本教程中,我将演示如何使用由吴秋生博士基于第一版和第二版 "分段任何模型(SAM)"开发的 segment-anything-py 和 segment-geospatial Python 软件包。所有代码都是在 Google Colab 中编写和测试的,任何人都可以轻松复制这些步骤。如果您对此感兴趣,请继续阅读!
🚀 设置 Google Colab
所有代码都将使用 Python 编写,并在 Google Colab 平台上进行测试,因此您无需安装各种软件和编译器即可按照步骤进行操作。由于运行 SAM 需要 GPU,因此请确保将运行时更改为 TPUv4,方法是点击 "运行时 "选项卡,选择 "更改运行时类型",然后选择 "TPUv4"。此外,还需要使用 pip 命令安装以下软件包:
pip install pandas rasterio🛰️ 加载清晰的哨兵-2 图像
设置好 Google Colab 后,我们需要一张农田的航空图像。我在本教程中使用了一张哨兵-2 图像,但您也可以使用任何按顺序(蓝、绿、红)保存了红色、绿色和蓝色波段的卫星图像。
Downloading Sentinel-2 Imagery in Python with Google Colab (Updated Nov 2023)
并使用以下信息检索相同的图像:图像信息 (S2B_MSIL2A_20240806T184919_N0511_R113_T10SFH):
url_dataspace = "https://catalogue.dataspace.copernicus.eu/odata/v1"satellite = "SENTINEL-2"
level = "S2MSI2A"aoi_point = "POINT(-121.707902 38.368628)"cloud_cover = 10start_date = "2024-07-15"
end_date = "2024-08-10"
start_date_full =start_date+"T00:00:00.000Z"
end_date_full = end_date +"T00:00:00.000Z" 按照这些步骤操作后,您的内容文件夹中就会出现 JP2 格式的三个单独色带(红、绿、蓝),如下图所示:
🌍 在哨兵-2 图像上应用 SAM2
将 SAM2 应用于卫星图像相对简单,但需要额外的步骤为模型准备图像。第一步是剪切下载的场景,将重点放在我们感兴趣的区域(AOI)上,因为完整的场景可能包括我们不感兴趣的区域,如城区、海洋、湖泊、山脉或森林。此外,Google Colab 的资源可能不足以处理整个场景。要创建一个较小的 AOI,我们可以在农业区域内定义一个点,并在该点的周围设置一个约 5 千米的缓冲区。
第二步是保存剪切后的图像,并将波段排序为蓝、绿、红("BGR"),因为算法希望采用这种顺序,而不是通常的 "RGB"。最后,将输出保存为 GeoTIFF 格式,因为算法不接受 JP2 格式的文件。下面的代码在点周围定义了一个缓冲区,根据边界框剪切红、绿、蓝三色带,并以 BGR 顺序将输出保存为 GeoTIFF 格式:
import rasterio
from rasterio.merge import merge
from rasterio.plot import show
from rasterio.mask import mask
from shapely.geometry import Point, box
from shapely.wkt import loads as load_wkt
import geopandas as gpd
from pyproj import CRS, Transformer
import numpy as np
import osdef clip_and_merge_jp2_files(blue_jp2, green_jp2, red_jp2, aoi_point_wkt, buffer_radius_km, output_tiff):# Parse the AOI point from WKTaoi_point = load_wkt(aoi_point_wkt)# Open the JP2 fileswith rasterio.open(blue_jp2) as blue_src, \rasterio.open(green_jp2) as green_src, \rasterio.open(red_jp2) as red_src:# Get the CRS of the JP2 files jp2_crs = blue_src.crs# Create a GeoDataFrame for the AOI point aoi_gdf = gpd.GeoDataFrame({'geometry': [aoi_point]}, crs="EPSG:4326")# Reproject the AOI point to the JP2 CRS if aoi_gdf.crs != jp2_crs:aoi_gdf = aoi_gdf.to_crs(jp2_crs)# Create a buffer around the AOI point (in meters)buffer_radius = buffer_radius_km * 1000 # Convert km to metersaoi_buffer = aoi_gdf.geometry.buffer(buffer_radius).iloc[0]# Convert the buffer to a bounding boxminx, miny, maxx, maxy = aoi_buffer.boundsbbox = box(minx, miny, maxx, maxy)# Convert the bbox to a GeoDataFramebbox_gdf = gpd.GeoDataFrame({'geometry': [bbox]}, crs=jp2_crs)# Clip each band using the bboxblue_clipped, blue_transform = mask(blue_src, bbox_gdf.geometry, crop=True)green_clipped, green_transform = mask(green_src, bbox_gdf.geometry, crop=True)red_clipped, red_transform = mask(red_src, bbox_gdf.geometry, crop=True)# Update the metadata meta = blue_src.meta.copy()meta.update({"driver": "GTiff","height": blue_clipped.shape[1],"width": blue_clipped.shape[2],"transform": blue_transform,"count": 3, # We have three bands: B, G, R"dtype": blue_clipped.dtype})# Merge the bands into a single arraymerged_bgr = np.stack([blue_clipped[0], green_clipped[0], red_clipped[0]])# Save the merged BGR image as a GeoTIFFwith rasterio.open(output_tiff, 'w', **meta) as dst:dst.write(merged_bgr)print(f"Clipped and merged image saved as {output_tiff}")blue_jp2 = 'T10SFH_20240806T184919_B02_10m.jp2'
green_jp2 = 'T10SFH_20240806T184919_B03_10m.jp2'
red_jp2 = 'T10SFH_20240806T184919_B04_10m.jp2'
buffer_radius_km = 1.5
output_tiff = 'BGR_20240806.tif'
aoi_point = "POINT(-121.707902 38.368628)" #AOI point (longitude, latitude)clip_and_merge_jp2_files(blue_jp2, green_jp2, red_jp2, aoi_point, buffer_radius_km, output_tiff)运行代码后,你应该能在内容文件夹中看到剪切后的图片:
import matplotlib.pyplot as pltdef plot_tiff(tiff_file):# Open the tiff filewith rasterio.open(tiff_file) as src:b_band = src.read(1) g_band = src.read(2) r_band = src.read(3) # Stack the bands into a single numpy arrayrgb = np.dstack((r_band, g_band, b_band))# Normalize the bands to the range [0, 1] (for display)rgb = rgb.astype(np.float32)rgb /= np.max(rgb)# Plot the imageplt.imshow(rgb)plt.axis('off') # Hide the axisplt.show()plot_tiff('BGR_20240806.tif')
下载图像后,下一步是剪切图像并将其保存为可接受的格式。我们需要更改图像格式,因为算法需要 8 位无符号格式,而剪切后的图像是浮点格式。下面的脚本转换了格式,并以 8 位无符号格式保存图像:
def convert_to_8bit(input_tiff, output_tiff):with rasterio.open(input_tiff) as src:blue = src.read(1)green = src.read(2)red = src.read(3)# Normalize the float values to 0-255 and convert to 8-bit unsigned integersblue_8bit = np.clip((blue - np.min(blue)) / (np.max(blue) - np.min(blue)) * 255, 0, 255).astype(np.uint8)green_8bit = np.clip((green - np.min(green)) / (np.max(green) - np.min(green)) * 255, 0, 255).astype(np.uint8)red_8bit = np.clip((red - np.min(red)) / (np.max(red) - np.min(red)) * 255, 0, 255).astype(np.uint8)# Define metadata profile = src.profileprofile.update(dtype=rasterio.uint8,count=3,compress='lzw')# Write the new 8-bit data to the output filewith rasterio.open(output_tiff, 'w', **profile) as dst:dst.write(blue_8bit, 1)dst.write(green_8bit, 2)dst.write(red_8bit, 3)input_tiff = 'BGR_20240806.tif'
output_tiff = 'BGR_20240806_8bit.tif'
convert_to_8bit(input_tiff, output_tiff)第三步是将 UTM 坐标的图像保存为地理坐标(经纬度)。运行以下代码即可完成此操作:
from rasterio.warp import calculate_default_transform, reproject, Resamplingdef convert_to_latlong(input_tiff, output_tiff):with rasterio.open(input_tiff) as src:transform, width, height = calculate_default_transform(src.crs, 'EPSG:4326', src.width, src.height, *src.bounds)kwargs = src.meta.copy()kwargs.update({'crs': 'EPSG:4326','transform': transform,'width': width,'height': height})with rasterio.open(output_tiff, 'w', **kwargs) as dst:for i in range(1, src.count + 1):reproject(source=rasterio.band(src, i),destination=rasterio.band(dst, i),src_transform=src.transform,src_crs=src.crs,dst_transform=transform,dst_crs='EPSG:4326',resampling=Resampling.nearest)input_tiff = 'BGR_20240806.tif'
output_tiff = 'BGR_20240806_reproj.tif'
convert_to_latlong(input_tiff, output_tiff)最后一步取决于您想如何部署和使用 SAM 算法。有两种模式可供选择:自动和手动。在自动模式下,算法只需要我们导出的准备好的图像(带地理坐标的 8 位无符号格式剪切 BGR 图像)。在手动模式下,您可以在每个对象上添加一个点,这通常有助于算法生成更精确的结果,并对用户点识别的对象进行分割。要在自动模式下运行算法,可以跳过下面的章节,直接跳到 "自动模式下的 SAM"。但是,如果您还想使用手动模式,请添加下面的脚本,这样您就可以点击图像并以经纬度存储您的点。
from localtileserver import get_folium_tile_layer, TileClient,get_leaflet_tile_layer
import ipyleaflet
from shapely.geometry import Point
from ipyleaflet import Map, Marker, ImageOverlay
from ipywidgets import Output, VBox
from IPython.display import display
import matplotlib.pyplot as plt
from PIL import Imagegeotiff_path = 'BGR_20240806_reproj.tif'# Create a TileClient object
client = TileClient(geotiff_path)# Create a TileLayer using the client
tiff_layer = get_leaflet_tile_layer(client, name='GeoTIFF')# Get the bounds of the GeoTIFF
bounds = client.bounds()
center = ((bounds[0] + bounds[1]) / 2, (bounds[2] + bounds[3]) / 2)# Create an ipyleaflet map
m = Map(center=center, zoom=14)# Add the TileLayer to the map
m.add_layer(tiff_layer)# Create a list to store the clicked points
clicked_points = []# Create an output widget to capture map click events
output = Output()# Function to handle clicks on the map
def handle_click(**kwargs):if 'type' in kwargs and kwargs['type'] == 'click':latlon = kwargs.get('coordinates')if latlon:lat, lon = latlonclicked_points.append(Point(lon, lat))marker = Marker(location=(lat, lon))m.add_layer(marker)with output:print(f"Point added: {lat}, {lon}")# Add the click handler to the map
m.on_interaction(handle_click)# Display the map and output widget
display(VBox([m, output]))
运行代码后,会出现一张交互式地图,您可以点击地图。每次点击后,这些点都会用蓝色标记标出,如下图所示: 要查看您在地图上所选点的坐标,只需运行以下代码即可:
要查看您在地图上所选点的坐标,只需运行以下代码即可:
clicked_points[<POINT (-121.709 38.371)>,<POINT (-121.716 38.371)>,<POINT (-121.717 38.37)>,<POINT (-121.717 38.368)>,<POINT (-121.717 38.366)>,<POINT (-121.709 38.366)>,<POINT (-121.709 38.369)>,<POINT (-121.7 38.371)>,<POINT (-121.701 38.369)>,<POINT (-121.7 38.367)>,<POINT (-121.697 38.375)>,<POINT (-121.715 38.377)>,<POINT (-121.718 38.379)>,<POINT (-121.72 38.363)>,<POINT (-121.699 38.362)>]您还可以通过使用
# Function to export the points to a GeoPackage
def export_to_gpkg(points, output_path):"""Export points to a GeoPackage."""gdf = gpd.GeoDataFrame(geometry=points, crs="EPSG:4326")gdf.to_file(output_path, driver="GPKG")output_gpkg_path = 'output.gpkg'
export_to_gpkg(clicked_points, output_gpkg_path)自动模式的 SAM
如前所述,如果输入图像的格式符合 SAM 算法的要求,那么在 Google Colab 平台上运行算法就相对简单。由于我们已经完成了下载、剪切、格式化、更改波段顺序和调整数据类型等所有必要步骤,现在我们的图像已经准备就绪,是时候执行 SAM 并查看结果了。本节主要介绍 SAM 的自动模式,我们将安装由吴秋生博士开发的地理空间版 SAM,选择预训练模型,并将结果可视化。要启动 SAM,只需安装以下软件包并加载这些库:
pip install -U segment-geospatial
import leafmap
from samgeo import SamGeo2, regularize,SamGeo安装 segment-geospatial 软件包大约需要 5 到 10 分钟,因此在运行该行时请耐心等待。安装软件包并导入库后,我们可以选择预训练模型,并通过配置 SAM 选择自动模式:
sam = SamGeo2(model_id="sam2-hiera-large",automatic=True,
)可视化分割图像前的最后一步是使用我们的图像,定义输出名称,并通过以下代码运行算法:
image = 'BGR_20240806_8bit.tif'
mask = 'segment_auto.tif'
sam.generate(image, mask)最后一行将生成 segment_auto.tif 文件,该文件可在内容文件夹中找到。
现在,我们已经得到了结果,可以使用分割地图对原始图像和分割图像进行可视化处理。在这张地图中,右侧显示的是 RGB 的原始卫星图像,左侧显示的是 SAM 在自动模式下生成的分割图像:
m = leafmap.Map()
m.add_raster(image, layer_name="Image")
m.split_map('segment_auto.tif',image,left_label="auto_mask",right_label="Aerial imagery",left_args={"colormap": "tab20", "nodata": 0, "opacity": 0.7},
)
m 如图所示,在这种类型的图像和自动模式下,SAM 能够分割出几个区块,但在这一帧中错过了大部分区块。下一步,我们将使用手动模式,看看手动选择区块是否有助于提高准确性。
如图所示,在这种类型的图像和自动模式下,SAM 能够分割出几个区块,但在这一帧中错过了大部分区块。下一步,我们将使用手动模式,看看手动选择区块是否有助于提高准确性。
带手动模式的 SAM
由于自动模式在分割卫星图像中的农场边界方面不是很成功,我们将在手动模式下再次运行该算法。在此,我们将提供位于几个农场内的点,并要求模型分割这些点所识别的对象。步骤与上一节(自动模式)类似,但有一个例外:添加用户输入。要将点输入算法,应从 geopackage(.gpkg)文件中提取点的坐标,并将其格式化为列表。下面的代码将 geopackage 文件转换为所需格式,以便使用我们的点运行 SAM:
import geopandas as gpddef convert_gpkg_to_point_coords_batch(gpkg_file):gdf = gpd.read_file(gpkg_file)if not all(gdf.geometry.geom_type == 'Point'):raise ValueError("The GeoPackage file must contain only point geometries.")point_coords_batch = [[point.x, point.y] for point in gdf.geometry]return point_coords_batchgpkg_file = "output.gpkg"
point_coords_batch = convert_gpkg_to_point_coords_batch(gpkg_file)
print(point_coords_batch)在配置文件中,只需将自动变量设置为 "假 "即可:
sam = SamGeo2(model_id="sam2-hiera-large",automatic=False,
)sam.set_image(image)然后,使用 sam.predict_by_points 根据之前选择的点运行算法。输出结果将以 mask.tif 的形式保存在内容文件夹中。
sam.predict_by_points(point_coords_batch=point_coords_batch,point_crs="EPSG:4326",output="mask.tif",dtype="uint8",
)与自动模式类似,我们可以使用 leafmap 库中的分割图功能来并排显示分割后的图像和原始图像:
m = leafmap.Map()
m.add_raster(image, layer_name="Image")
m.add_circle_markers_from_xy('output.gpkg', radius=3, color="red", fill_color="yellow", fill_opacity=0.8
)
m.split_map('mask.tif',image,left_label="masks",right_label="Aerial imagery",left_args={"colormap": "tab20", "nodata": 0, "opacity": 0.7},
)
m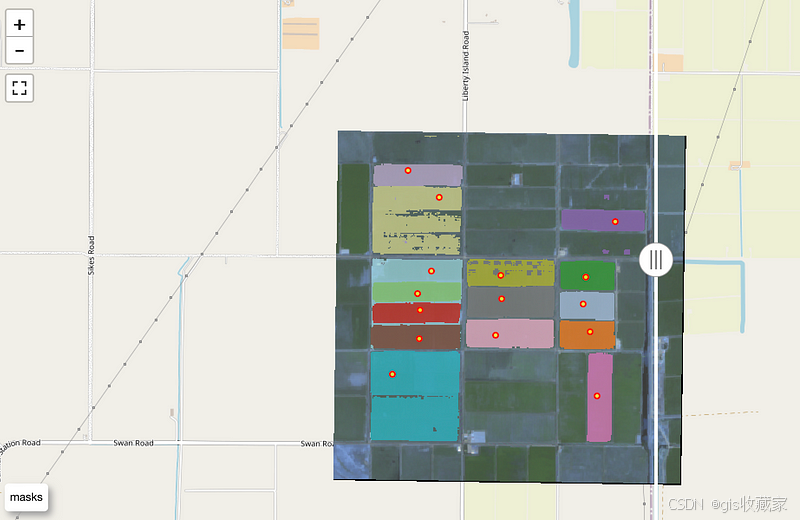 如图所示,随着输入点的增加,SAM2 在检测田块边界方面的性能有了显著提高,这有助于限制图像中的片段数量。然而,在一些区块中出现了一些绿色斑块,这些斑块代表了属于某些田地但被排除在区段之外的区域。这种排除种植区的情况会严重影响结果,导致根据分割的田地边界计算出的面积被低估。
如图所示,随着输入点的增加,SAM2 在检测田块边界方面的性能有了显著提高,这有助于限制图像中的片段数量。然而,在一些区块中出现了一些绿色斑块,这些斑块代表了属于某些田地但被排除在区段之外的区域。这种排除种植区的情况会严重影响结果,导致根据分割的田地边界计算出的面积被低估。
📄 结论
Segment Anything Model(SAM)的第二个版本是一种强大的无监督算法,用于自动创建任何图像的分割层,与大约一年前发布的第一个版本类似。该算法有望应用于众多与检测和计算物体相关的人工智能和 ML 项目中。然而,与任何算法一样,它也需要在不同的对象上进行评估,以了解它在哪些方面表现良好,在哪些方面存在局限性。通过这些评估,我们可以深入了解改进的机会。
我以用户身份在卫星图像上测试了 SAM2,以检测田地边界。我发现自动模式只能检测到几个区块,而用户输入点的性能则明显提高。不过,田地边界仍然排除了一些斑块。提高图像分辨率,或根据植被指数将图像从 RGB 转换为单一波段,或改变预训练模型,都可能提高算法的性能。
相关文章:
利用 SAM2 模型探测卫星图像中的农田边界
将 Segment Anything Model Version 2 应用于卫星图像以检测和导出农业地区田地边界的分步教程 🌟 简介 手动绘制田地边界是最耗时的任务之一,其准确性取决于绘制者的表现。然而,精确的边界检测在很多领域都有应用。例如,假设您…...

前端路由的hash模式和history模式
hash 模式和 history 模式是前端路由实现的两种常见方式,分别基于不同的浏览器特性实现。下面从浏览器实现、前端框架实现及相关标准定义三个方面详细解释这两种模式。 1. 浏览器实现 1.1 Hash 模式 • 核心机制: • 基于浏览器的 location.hash 属性…...
日志收集Day005
1.filebeat的input类型之filestream实战案例: 在7.16版本中已经弃用log类型,之后需要使用filebeat,与log不同,filebeat的message无需设置就是顶级字段 1.1简单使用: filebeat.inputs: - type: filestreamenabled: truepaths:- /tmp/myfilestream01.lo…...

代码随想录 二叉树 test 2
二叉树的非递归遍历 先序 方法一: 先保存根节点,用来之后找到右子树(利用栈来回溯到根,进而找到右子树) class Solution { public:vector<int> preorderTraversal(TreeNode* root) {vector<int> res; //存遍历序列stack<TreeNode*…...

浏览器默认语言与页面访问统计问题二三则
文章目录 前言网站默认语言问题网站访问统计问题Error: Empty components are self-closingError: A space is required before closing bracket 总结 前言 看标题大概能猜到这是一篇杂合体的总结,是这两天处理网站遇到的小问题,怕过段时间再忘了所以总…...

用Python绘制一只懒羊羊
目录 一、准备工作 二、Turtle库简介 三、绘制懒羊羊的步骤 1. 导入Turtle库并设置画布 2. 绘制头部 3. 绘制眼睛 4. 绘制嘴巴 5. 绘制身体 6. 绘制四肢 7. 完成绘制 五、运行代码与结果展示 六、总结 在这个趣味盎然的技术实践中,我们将使用Python和Turtle图形…...

虹科分享 | 汽车NVH小课堂之听音辨故障
随着车主开始关注汽车抖动异响问题,如何根据故障现象快速诊断异响来源,成了汽修人的必修课。 一个比较常用的方法就是靠“听”——“听音辨故障”。那今天,虹科Pico也整理了几个不同类型的异响声音,一起来听听看你能答对几个吧 汽…...

论文速读|SigLIP:Sigmoid Loss for Language Image Pre-Training.ICCV23
论文地址:https://arxiv.org/abs/2303.15343v4 代码地址:https://github.com/google-research/big_vision bib引用: misc{zhai2023sigmoidlosslanguageimage,title{Sigmoid Loss for Language Image Pre-Training}, author{Xiaohua Zhai and…...
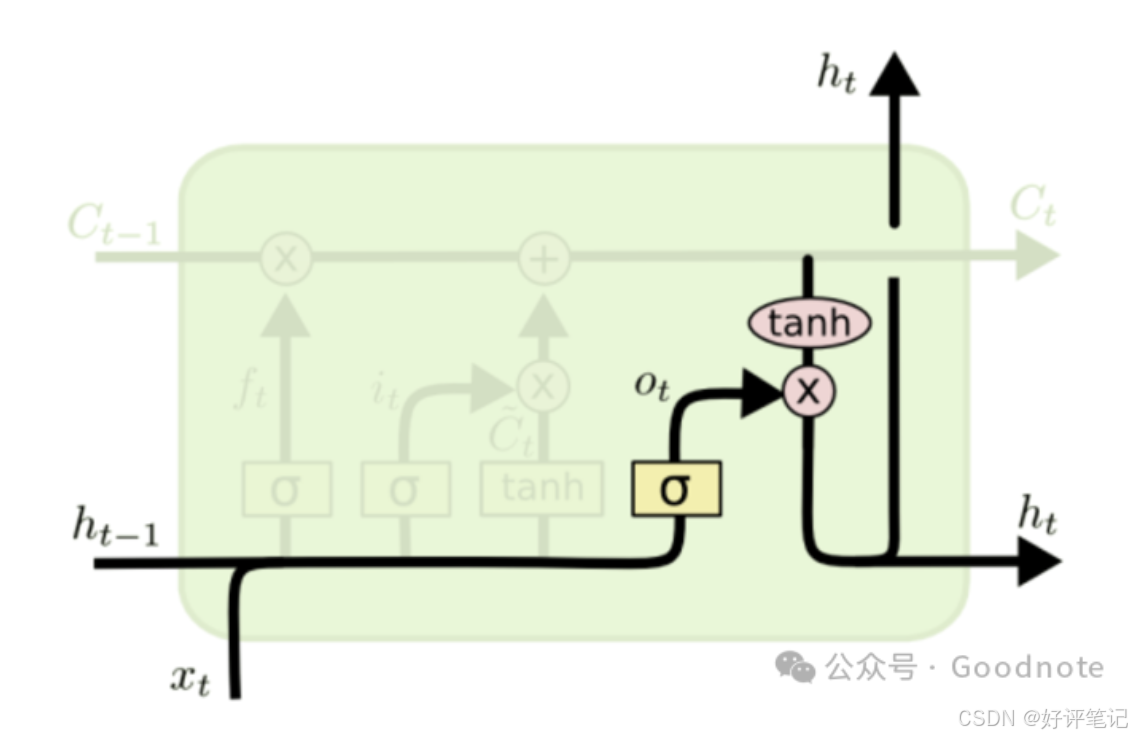
深度学习笔记——循环神经网络之LSTM
大家好,这里是好评笔记,公主号:Goodnote,专栏文章私信限时Free。本文详细介绍面试过程中可能遇到的循环神经网络LSTM知识点。 文章目录 文本特征提取的方法1. 基础方法1.1 词袋模型(Bag of Words, BOW)工作…...
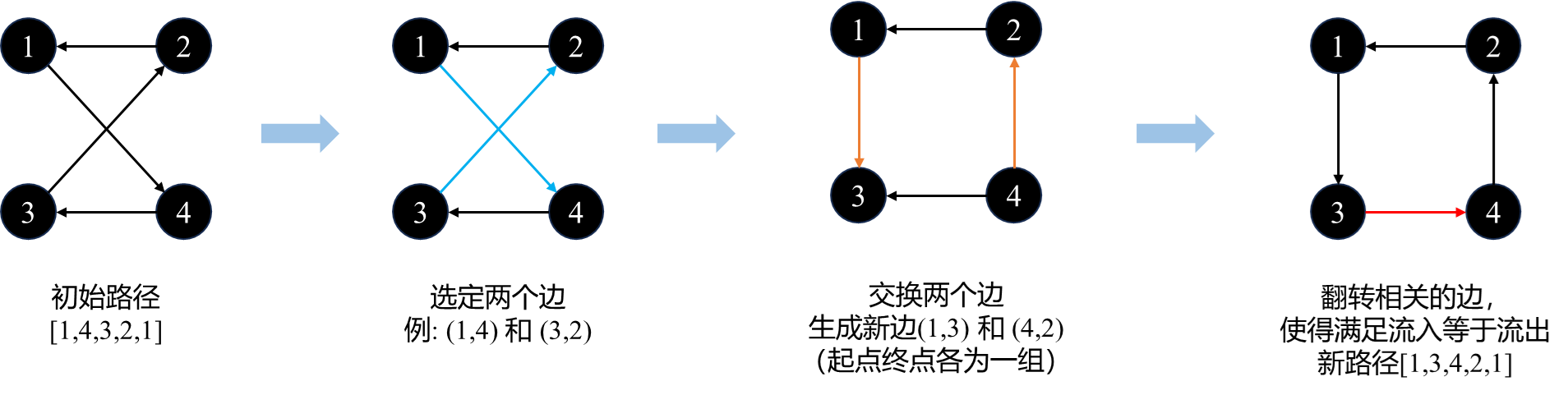
算法整理:2-opt求解旅行商(Python代码)
文章目录 算法思想算法步骤代码1纯函数代码2纯函数数据可视化 算法思想 通过交换边进行寻优。 算法步骤 把初始解作为当前解 通过交换边生成新解 如果新解优于历史最优解,则更新当前解为新解 重复2,3,直到当前解交换了所有的边均不能改…...

状态模式
在软件开发过程中,我们经常会遇到这样的情况:一个对象的行为会随着其内部状态的改变而发生变化。例如,一个手机在不同状态下(开机、关机、静音等)对相同的操作(如来电)会有不同的反应。传统的解…...

RoHS 简介
RoHS(Restriction of Hazardous Substances Directive,限制有害物质指令)是欧盟制定的一项环保法规,旨在限制电气和电子设备中某些有害物质的使用,以减少这些产品对环境和人体健康的危害。 RoHS限制的有害物质及其限量…...

【Vim Masterclass 笔记26】S11L46:Vim 插件的安装、使用与日常管理
文章目录 Section 11:Vim PluginsS11L46 Managing Vim Plugins1 第三方插件管理工具2 安装插件使用的搜索引擎3 Vim 插件的安装方法4 存放 Vim 插件包的路径格式5 示例一:插件 NERDTree 的安装6 示例二:插件 ctrlp.vim 的安装7 示例三&#x…...
深度学习原理与Pytorch实战
深度学习原理与Pytorch实战 第2版 强化学习人工智能神经网络书籍 python动手学深度学习框架书 TransformerBERT图神经网络: 技术讲解 编辑推荐 1.基于PyTorch新版本,涵盖深度学习基础知识和前沿技术,由浅入深,通俗易懂…...

ELK环境搭建
文章目录 1.ElasticSearch安装1.安装的版本选择1.SpringBoot版本:2.4.2 找到依赖的spring-data-elasticsearch的版本2.spring-data-elasticsearch版本:4.1.3 找到依赖的elasticsearch版本3.elasticsearch版本:7.9.3 2.安装1.官方文档2.下载压…...
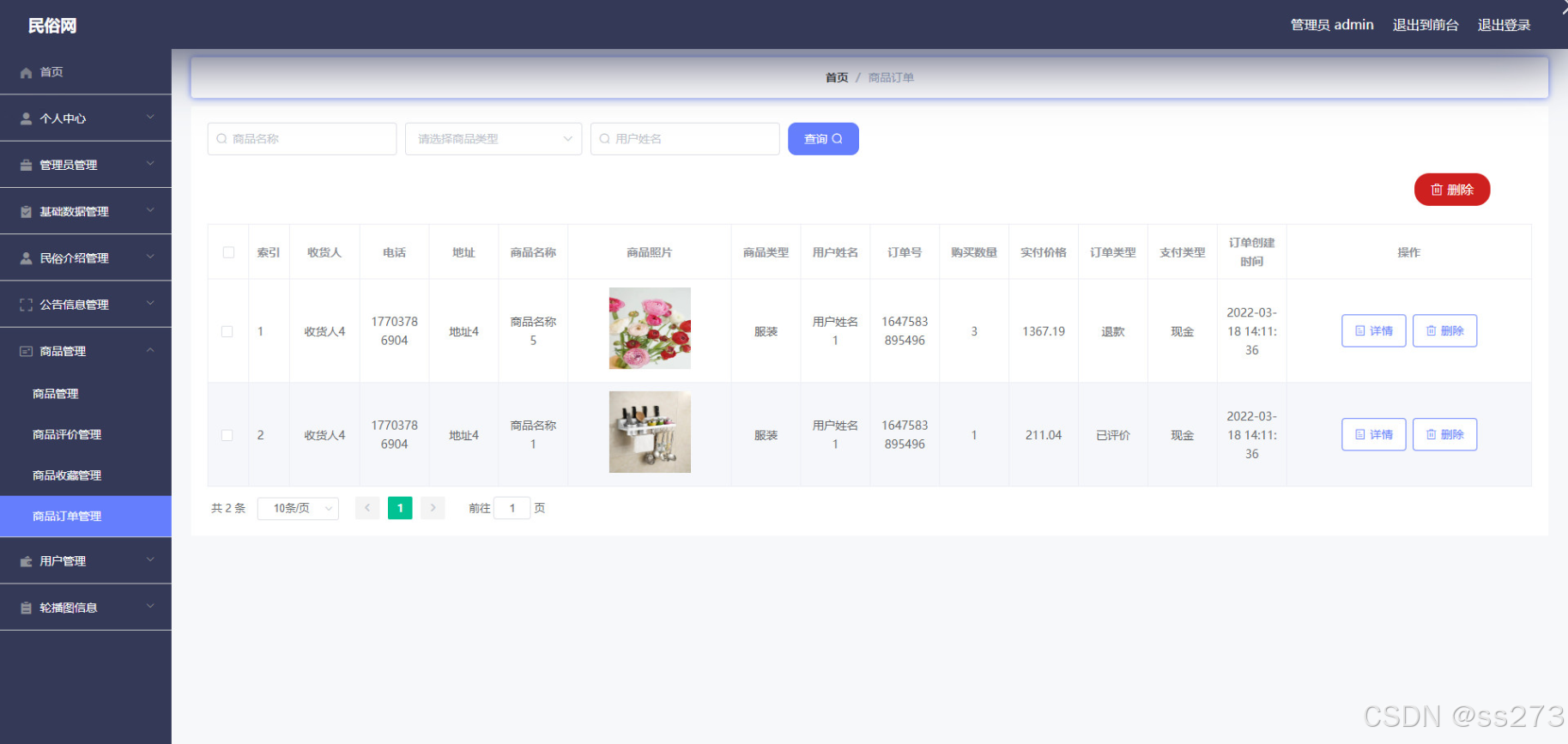
基于Springboot + vue实现的民俗网
“前些天发现了一个巨牛的人工智能学习网站,通俗易懂,风趣幽默,忍不住分享一下给大家。点击跳转到网站:人工智能学习网站” 💖学习知识需费心, 📕整理归纳更费神。 🎉源码免费人人喜…...
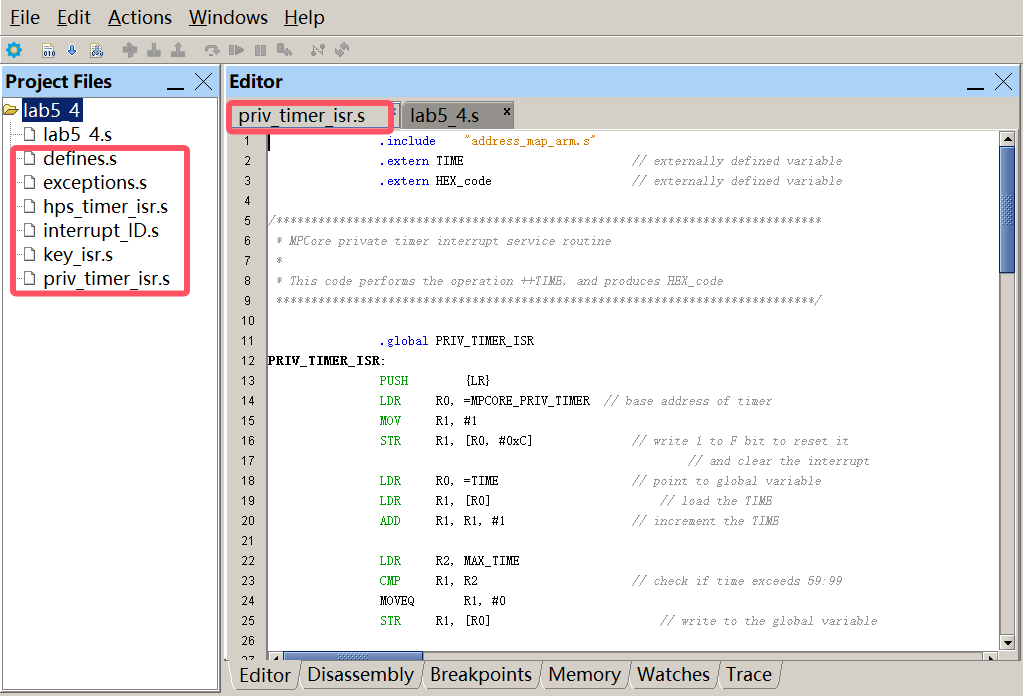
第24篇 基于ARM A9处理器用汇编语言实现中断<六>
Q:怎样设计ARM处理器汇编语言程序使用定时器中断实现实时时钟? A:此前我们曾使用轮询定时器I/O的方式实现实时时钟,而在本实验中将采用定时器中断的方式。新增第三个中断源A9 Private Timer,对该定时器进行配置&#…...
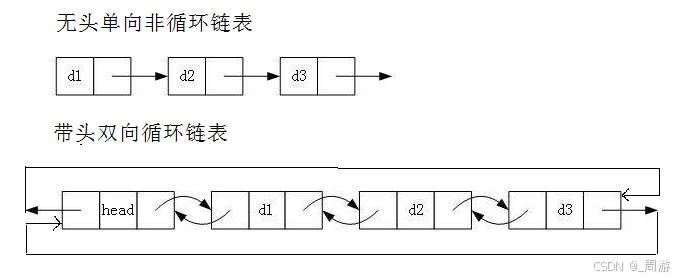
【数据结构】_不带头非循环单向链表
目录 1. 链表的概念及结构 2. 链表的分类 3. 单链表的实现 3.1 SList.h头文件 3.2 SList.c源文件 3.3 Test_SList.c测试文件 关于线性表,已介绍顺序表,详见下文: 【数据结构】_顺序表-CSDN博客 本文介绍链表; 基于顺序表…...

golang 使用双向链表作为container/heap的载体
MyHeap:container/heap的数据载体,需要实现以下方法: Len:堆中数据个数 Less:第i个元素 是否必 第j个元素 值小 Swap:交换第i个元素和 第j个元素 Push:向堆中追加元素 Pop:从堆…...

C#集合操作优化:高效实现批量添加与删除
在C#中,对集合进行批量操作(如批量添加或删除元素)通常涉及使用集合类型提供的方法和特性,以及可能的循环或LINQ查询来高效地处理大量数据。以下是一些常见的方法和技巧: 批量添加元素 使用集合的AddRange方法&#x…...

③ AI副业第一步:如何找到适合自己的AI赚钱赛道
③ AI副业第一步:如何找到适合自己的AI赚钱赛道选对赛道,努力才有意义。选错赛道,越努力离钱越远。前言:为什么大多数人AI副业做不起来? 我观察了100想做AI副业的人,失败的原因高度一致: 失败路…...

Tftpd32/Tftpd64不止是TFTP!手把手教你玩转它的DHCP和Syslog服务器功能
Tftpd32/Tftpd64:解锁DHCP与Syslog服务的隐藏潜力当大多数人提起Tftpd32/Tftpd64时,第一反应往往是它作为TFTP服务器的功能。这款轻量级工具确实在文件传输领域表现出色,但它的能力远不止于此。今天,我们将深入探索这款软件中两个…...

用数字逻辑门复刻柏林钟:从二进制编码到硬件实现
1. 项目概述:用数字电路复刻“柏林钟”作为一个在柏林长大的孩子,我从小就对库达姆大街上的那座“柏林钟”着迷。它不像传统时钟那样用指针或数字告诉你时间,而是通过几排不同颜色的发光方块,以一种近乎艺术的方式呈现时间。这种独…...

【UniApp小程序开发】解决无法使用Vue自定义指令的完美替代方案:权限组件封装
在 UniApp 开发中,你是否遇到过这样的困惑:明明在 Vue Web 项目中用得顺手的 v-permission 自定义指令,一到小程序端就完全失效?本文将深入剖析其原因,并提供一套可直接复用的组件化解决方案,让你在小程序中…...
)
Midjourney锐化效果失效真相(2024官方未公开的渲染管线瓶颈解析)
更多请点击: https://intelliparadigm.com 第一章:Midjourney锐化效果失效真相(2024官方未公开的渲染管线瓶颈解析) 自2024年V6.2版本起,大量用户反馈 --stylize 与 --sharp 参数组合下图像边缘锐化效果显著弱化&am…...

炉石传说自动对战助手:5分钟上手,彻底解放双手的终极指南
炉石传说自动对战助手:5分钟上手,彻底解放双手的终极指南 【免费下载链接】Hearthstone-Script Hearthstone script(炉石传说脚本) 项目地址: https://gitcode.com/gh_mirrors/he/Hearthstone-Script 还在为每天重复的炉石…...

机器学习与SHAP在教育公平研究中的应用:精准定位学业困境根源
1. 项目概述:当机器学习遇见教育公平,我们如何精准定位学业困境的根源?在拉丁美洲的教育研究领域,一个长期困扰政策制定者和研究者的核心问题是:究竟是什么因素,在复杂的社会经济背景下,系统性地…...

配置OpenClaw Agent使用Taotoken作为后端模型提供商
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 配置OpenClaw Agent使用Taotoken作为后端模型提供商 基础教程类,指导希望使用OpenClaw等Agent工具的开发者,…...

Unity iOS构建报错SDK version is 0的根因与精准修复
1. 这个报错不是Unity在“发脾气”,而是工程配置在“装死”刚接手一个老项目,打开Unity编辑器,点Build Settings准备打包iOS,结果弹出一行红字:“SDK version is 0, cannot build”。我第一反应是——这什么鬼…...
--脚本介绍)
二十六.签名与脚本(1)--脚本介绍
1.区块链脚本介绍在之前的章节中,我们了解了签名与验证相关,但是btc的交易数据,签名和验证,不是单纯的,还有脚本深度参与其中。我们从开始来:bool SendMoney(CScript scriptPubKey, int64 nValue, CWalletT…...