Linux 学习记录58(ARM篇)
Linux 学习记录58(ARM篇)
本文目录
- Linux 学习记录58(ARM篇)
- 一、GIC相关寄存器
- 1. 系统框图
- 2. 中断号对应关系
- 二、GICD寄存器
- 1. GICD_CTLR
- 2. GICD_ISENABLERx
- 3. GICD_IPRIORITYRx
- 4. GICD_ITARGETSRx
- 5. GICD_ICPENDRx
- 三、GICC寄存器
- 1. GICC_PMR
- 2. GICC_CTLR
- 3. GICC_IAR
- 4. GICC_EOIR
- 四、封装函数
- 1. 寄存器封装
- 2. EXTI初始化结构体/枚举封装
- 3. GICD初始化结构体/枚举
- 4. GICC初始化结构体/枚举
- 5. EXTI函数
- 6. GICD函数
- 7. GICC函数
- 8. 使用示例
一、GIC相关寄存器
1. 系统框图
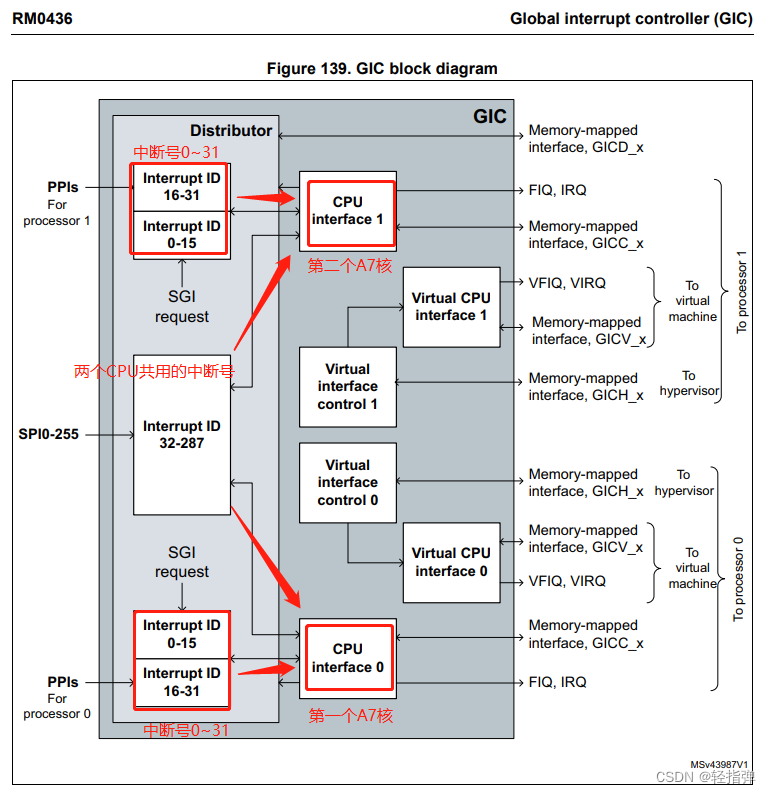
- PPI:私有外设中断号:(ID:0~15)
- SPI:共享外设中断号:(ID:16~31)
- SGI:软件产生的中断号:(ID:0~287)
总结:
GIC层一共管理288个中断号(ID:0 ~ 287),16个SGIS,16个PPIS,256个SPIS
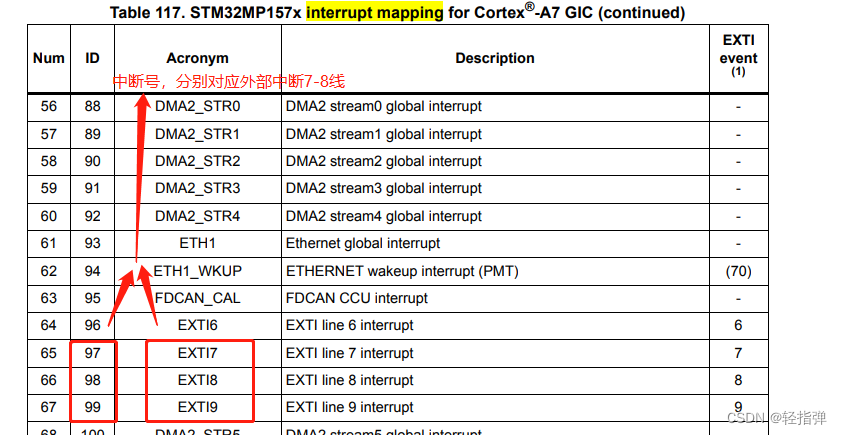
2. 中断号对应关系
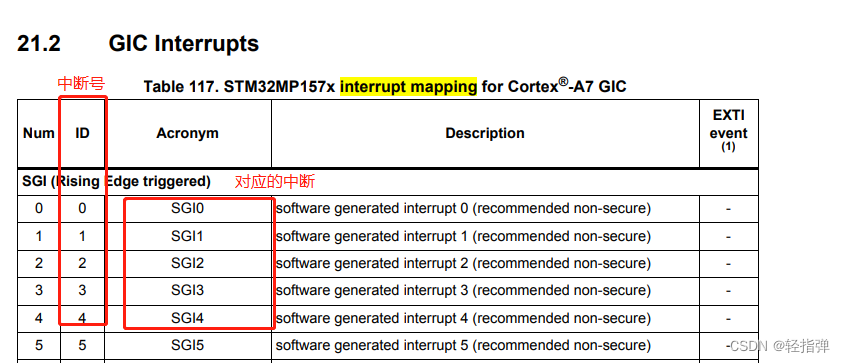
例:
二、GICD寄存器
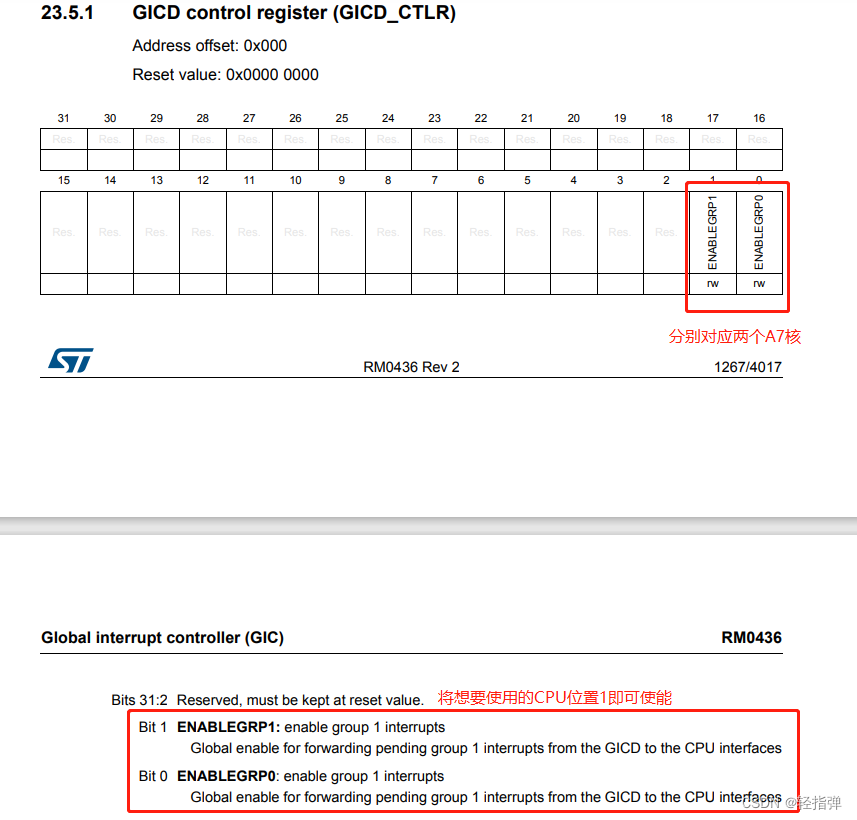
1. GICD_CTLR
功能:使能CPU
2. GICD_ISENABLERx
功能:设置GICD层中断使能
该寄存器共有8个(0-8),用于使能GICD层的的288个中断号,每个寄存器32位,分别控制32个中断号的使能
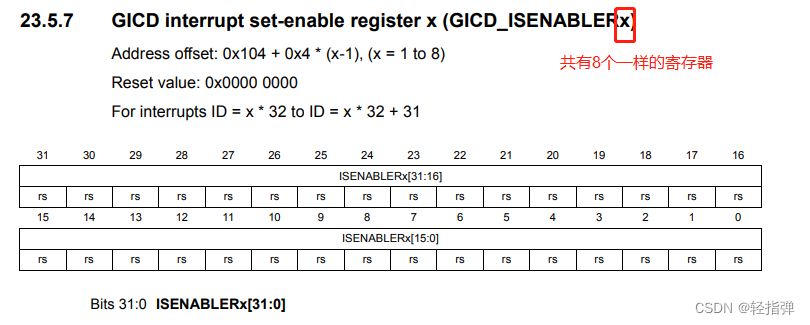
计算方式
置1 为使能
int ID = 99//中断号,以外部中断号为99的ID为例
ID / 32 = 3
使用" GICD_ISENABLER3 "寄存器即可
ID % 32 = 3
使用" GICD_ISENABLER3 "寄存器的第 "3 bit位" 即可
3. GICD_IPRIORITYRx
功能:设置GICD层中断优先级
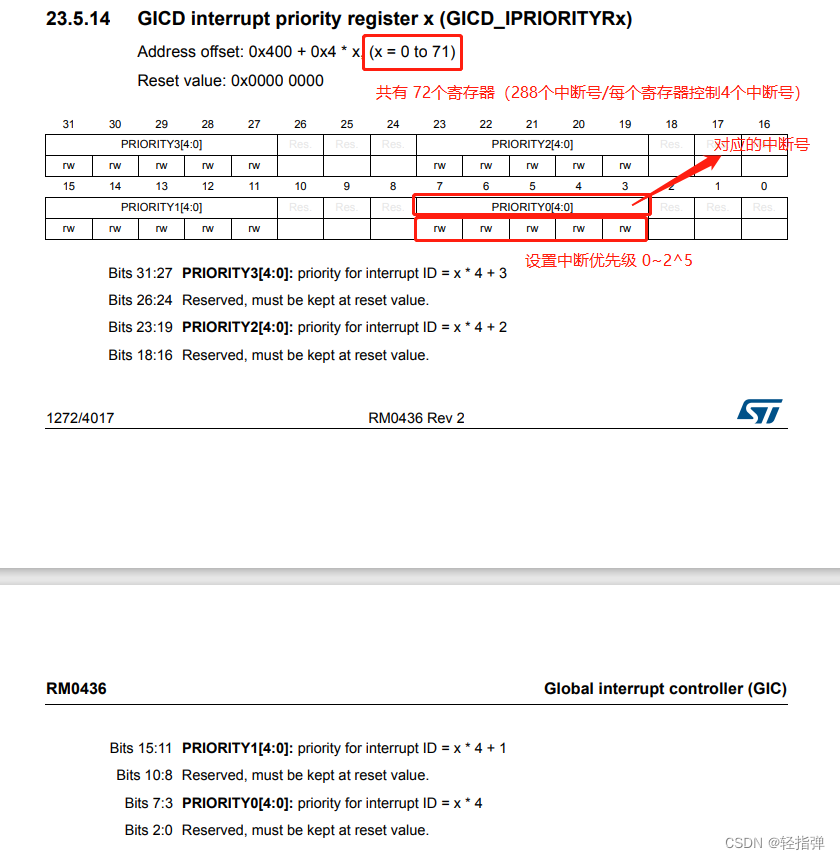
计算方式
备注:设置中断优先级值的范围在:0 ~ 2^5 -1 GICD层中断优先级,需要比GICC层中断优先级高 中断优先级的值越小,代表中断优先级越高
int ID = 99//中断号,以外部中断号为99的ID为例
ID / 4 = 24
使用" GICD_IPRIORITYR第24个"寄存器即可
ID % 4 = 3 (*8+3) =27
从" GICD_IPRIORITYR第24个 "寄存器的第 "27 ~ 37(27+4) bit位" 即可
4. GICD_ITARGETSRx
功能:分配给cpu0 或者 cpu1
该寄存器共有72个(0~71)个寄存器 [ 288个中断号/每个寄存器控制4个中断号的分配 ]
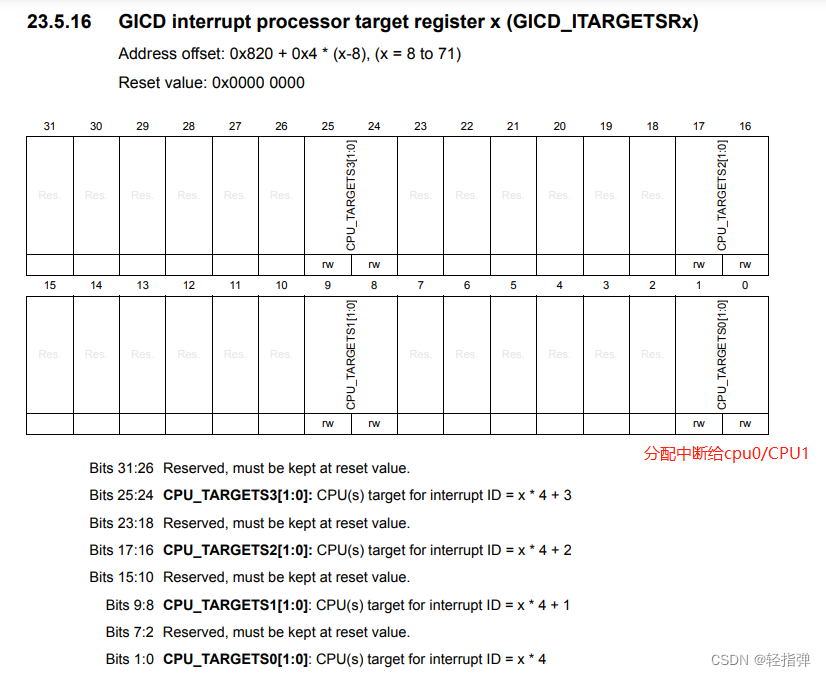
计算方式
int ID = 99//中断号,以外部中断号为99的ID为例
ID / 4 = 24
使用" GICD_ITARGETSR第24个"寄存器即可
ID % 4 = 3 (*8) =24
从" GICD_ITARGETSR第24个 "寄存器的第 "24 ~ 25(24+1) bit位" 即可
5. GICD_ICPENDRx
功能:清除GICD层挂起的中断标志位
该寄存器给共有8个寄存器[ 228个中断号/每个寄存器控制32个中断号的清除 ]
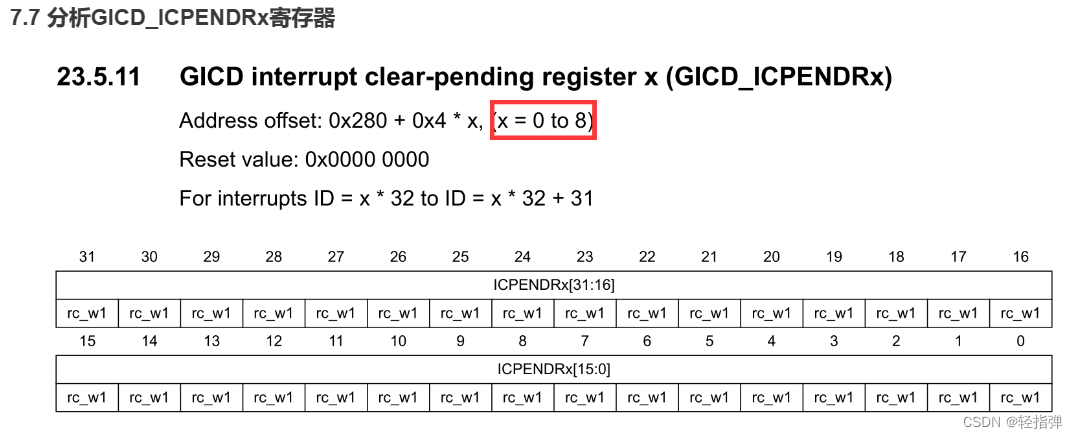
计算方式
置1为清除
int ID = 99//中断号,以外部中断号为99的ID为例
ID / 32 = 3
使用" GICD_ICPENDR第3个"寄存器即可
ID % 32 = 3
从" GICD_ICPENDR第3个 "寄存器的第 "3 bit位" 即可
三、GICC寄存器
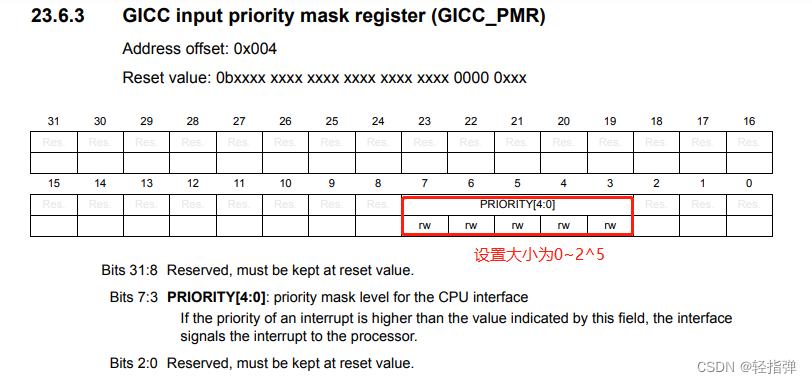
1. GICC_PMR
功能:设置GICC层中断优先级
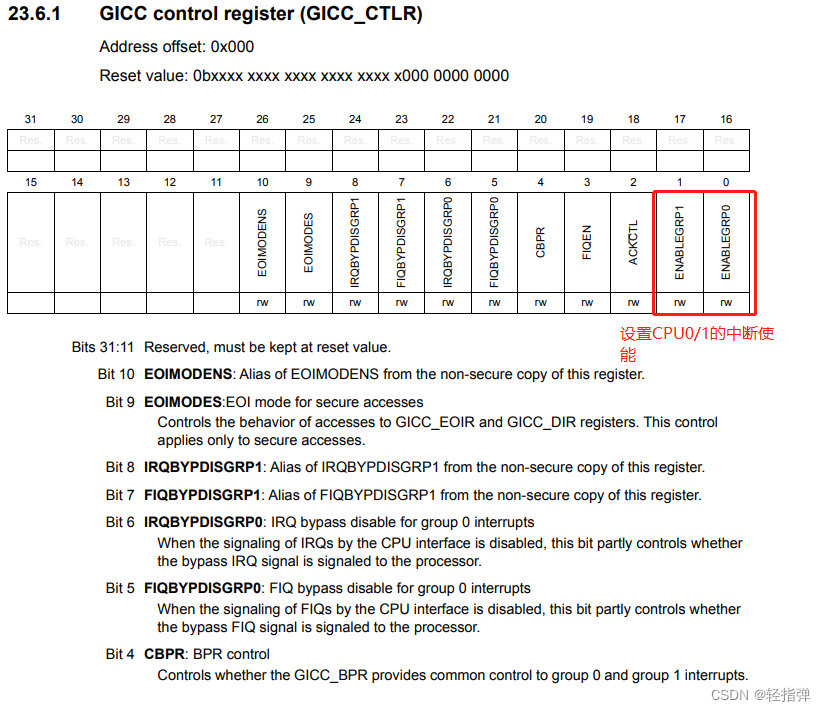
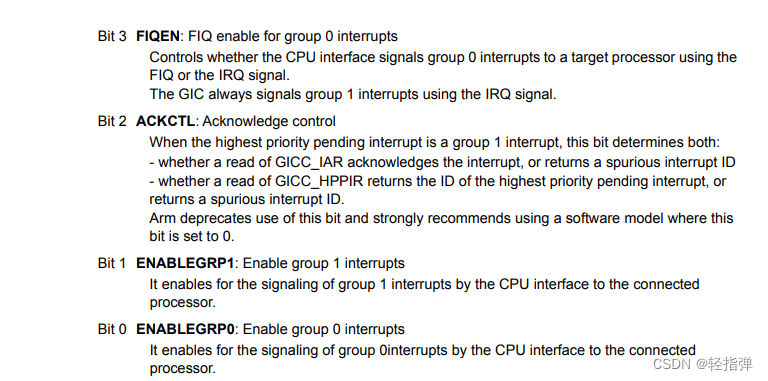
2. GICC_CTLR
功能:使能cpu中断
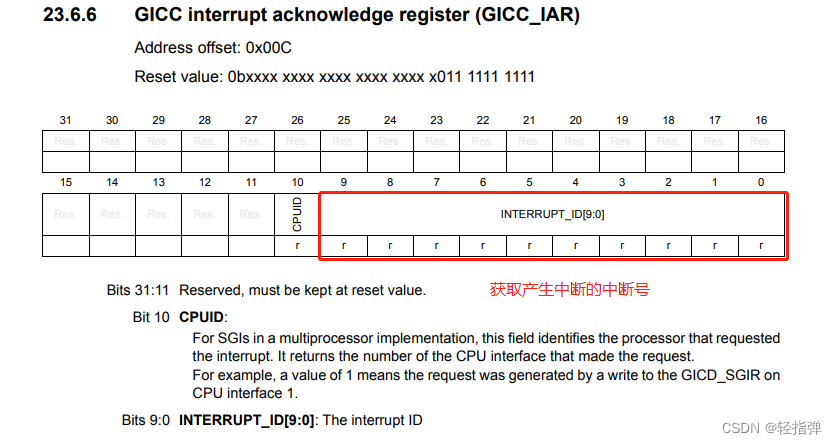
3. GICC_IAR
功能:获取中断号,这个寄存器只读
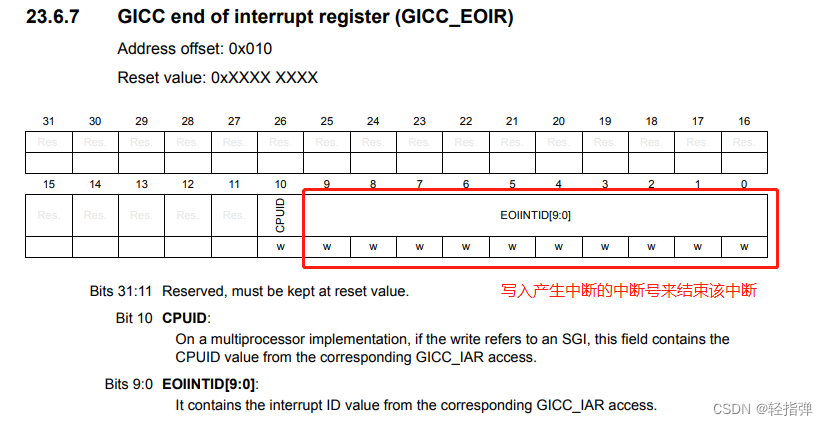
4. GICC_EOIR
功能:清除获取到中断号
四、封装函数
1. 寄存器封装
typedef unsigned char uint8_t;
typedef unsigned short int uint16_t;
typedef unsigned int uint32_t;#define __IO volatile
typedef struct{__IO uint32_t RTSR1; // EXTI rising trigger selection register __IO uint32_t FTSR1; // EXTI falling trigger selection register __IO uint32_t SWIER1; // EXTI software interrupt event register __IO uint32_t RPR1; // EXTI rising edge pending register__IO uint32_t FPR1; // EXTI falling edge pending register__IO uint32_t TZENR1; // EXTI TrustZone enable register__IO uint32_t RES1[2]; __IO uint32_t RTSR2; // EXTI rising trigger selection register__IO uint32_t FTSR2; // EXTI falling trigger selection register__IO uint32_t SWIER2; // EXTI software interrupt event register__IO uint32_t RPR2; // EXTI rising edge pending register__IO uint32_t FPR2; // EXTI falling edge pending register__IO uint32_t TZENR2; // EXTI TrustZone enable register__IO uint32_t RES2[2];__IO uint32_t RTSR3; // EXTI rising trigger selection register__IO uint32_t FTSR3; // EXTI falling trigger selection register__IO uint32_t SWIER3; // EXTI software interrupt event register__IO uint32_t RPR3; // EXTI rising edge pending register__IO uint32_t FPR3; // EXTI falling edge pending register__IO uint32_t TZENR3; // EXTI TrustZone enable register__IO uint32_t RES3[2];__IO uint32_t EXTICR1; // EXTI external interrupt selection register 1__IO uint32_t EXTICR2; // EXTI external interrupt selection register 2 __IO uint32_t EXTICR3; // EXTI external interrupt selection register 3 __IO uint32_t EXTICR4; // EXTI external interrupt selection register 4 __IO uint32_t RES4[4];__IO uint32_t C1IMR1; // EXTI CPU1 wakeup with interrupt mask register__IO uint32_t C1EMR1; // EXTI CPU1 wakeup with event mask register__IO uint32_t RES5[2];__IO uint32_t C1IMR2; // EXTI CPU1 wakeup with interrupt mask register__IO uint32_t C1EMR2; // EXTI CPU1 wakeup with event mask register__IO uint32_t RES6[2];__IO uint32_t C1IMR3; // EXTI CPU1 wakeup with interrupt mask register __IO uint32_t C1EMR3; // EXTI CPU1 wakeup with event mask register __IO uint32_t RES7[6];__IO uint32_t C2IMR1; // EXTI CPU2 wakeup with interrupt mask register__IO uint32_t C2EMR1; // EXTI CPU2 wakeup with event mask register__IO uint32_t RES8[2];__IO uint32_t C2IMR2; // EXTI CPU2 wakeup with interrupt mask register__IO uint32_t C2EMR2; // EXTI CPU2 wakeup with event mask register__IO uint32_t RES9[2];__IO uint32_t C2IMR3; // EXTI CPU2 wakeup with interrupt mask register __IO uint32_t C2EMR3; // EXTI CPU2 wakeup with event mask register __IO uint32_t RES10[2];
}EXTI_TypeDef;#define EXTI ((EXTI_TypeDef*)0x5000D000)typedef struct {volatile unsigned int CTRL;volatile unsigned int TYPER;volatile unsigned int IIDR;volatile unsigned int RES1[29];volatile unsigned int IGROUPR[9];volatile unsigned int RES2[23];volatile unsigned int ISENABLER[9];volatile unsigned int RES3[23];volatile unsigned int ICENABLER[9];volatile unsigned int RES4[23];volatile unsigned int ISPENDR[9];volatile unsigned int RES5[23];volatile unsigned int ICPENDR[9];volatile unsigned int RES6[23];volatile unsigned int ISACTIVER[9];volatile unsigned int RES7[23];volatile unsigned int ICACTIVER[9];volatile unsigned int RES8[23];volatile unsigned int IPRIORITYR[72];volatile unsigned int RES9[184];volatile unsigned int ITARGETSR[72];volatile unsigned int RES10[184]; volatile unsigned int ICFGR[18];volatile unsigned int RES11[46];}GICD_TypeDef;
#define GICD ((GICD_TypeDef*)0xA0021000)typedef struct {volatile unsigned int CTRL;volatile unsigned int PMR;volatile unsigned int BRR;volatile unsigned int IAR;volatile unsigned int EOIR;volatile unsigned int RPR;volatile unsigned int HPPIR;volatile unsigned int ABPR;volatile unsigned int AIAR;volatile unsigned int AEOIR;volatile unsigned int AHPPIR;volatile unsigned int RES1[41];volatile unsigned int APR0;volatile unsigned int RES2[3];volatile unsigned int NSAPR0;volatile unsigned int RES3[6];volatile unsigned int IIDR;volatile unsigned int RES4[960];volatile unsigned int DIRDIR;}GICC_TypeDef;
#define GICC ((GICC_TypeDef*)0xA0022000) 2. EXTI初始化结构体/枚举封装
typedef enum
{EXTI_GPIOA = 0x0,EXTI_GPIOB,EXTI_GPIOC,EXTI_GPIOD,EXTI_GPIOE,EXTI_GPIOF,EXTI_GPIOG,EXTI_GPIOH,EXTI_GPIOI,EXTI_GPIOJ,EXTI_GPIOK,EXTI_GPIOZ,
}EXTI_GPIOxTypedef;typedef enum
{EXTI_Trigger_Rising = 0x0,//上升EXTI_Trigger_Falling,//下降EXTI_Trigger_Rising_Falling,//双边沿
}EXTI_TriggerTypedef;typedef struct
{uint16_t EXTI_GPIOx;//GPIO组号uint16_t EXTI_Line;//中断线uint8_t EXTI_Trigger;//触发方式uint8_t EXTI_Wakeup;//是否屏蔽}EXTI_InitTypeDef;
/*相关函数声明*/
/*外部中断初始化*/
void EXTI_Init(EXTI_InitTypeDef* EXTI_Init);
/*清除挂起标志位s*/
void EXTI_Clr_FPR1(uint16_t ID);
3. GICD初始化结构体/枚举
typedef enum
{/*和GICC共用*/GIC_CPU0 = 0x1,//CPU0GIC_CPU1,//CPU1GIC_CPU1_0,//CPU1和CPU0
}GIC_CPUTypedef;typedef struct
{uint8_t GICD_CPU;//使能的CPUuint8_t GICD_Allocation_CPU;//分配CPUuint8_t GICD_priority;//设置优先级uint16_t GICD_interrupt_ID;//使能的中断号}GICD_InitTypeDef;
/*相关函数声明*/
/*GICD初始化*/
void GICD_Init(GICD_InitTypeDef* GICD_Init);
/*清除挂起标志位*/
void GICD_Clr_ICPENDR(uint16_t ID);
4. GICC初始化结构体/枚举
typedef struct
{uint8_t GICC_priority;//设置优先级uint8_t GICC_CPU;//使能的CPU
}GICC_InitTypeDef;
/*相关函数声明*/
/*GICC初始化*/
void GICC_Init(GICD_InitTypeDef* GICD_Init);
/*获取中断号*/
uint32_t GICC_Get_IAR(void);
/*清除中断号*/
void GICC_Clr_EOIR(uint32_t ID);
5. EXTI函数
void EXTI_Init(EXTI_InitTypeDef* EXTI_Init)
{uint8_t py = 0;py = EXTI_Init->EXTI_Line/4;py++;switch(py){case 1:{/*连接Pin到EXTI_line*/EXTI->EXTICR1 &= ~(0xff << ((EXTI_Init->EXTI_Line%4) *8));EXTI->EXTICR1 |= (EXTI_Init->EXTI_GPIOx << ((EXTI_Init->EXTI_Line%4) *8));}break;case 2:{/*连接Pin到EXTI_line*/EXTI->EXTICR2 &= ~(0xff << ((EXTI_Init->EXTI_Line%4) *8));EXTI->EXTICR2 |= (EXTI_Init->EXTI_GPIOx << ((EXTI_Init->EXTI_Line%4) *8));}break;case 3:{EXTI->EXTICR3 &= ~(0xff << ((EXTI_Init->EXTI_Line%4) *8));EXTI->EXTICR3 |= (EXTI_Init->EXTI_GPIOx << ((EXTI_Init->EXTI_Line%4) *8));}break;case 4:{/*连接Pin到EXTI_line*/EXTI->EXTICR4 &= ~(0xff << ((EXTI_Init->EXTI_Line%4) *8));EXTI->EXTICR4 |= (EXTI_Init->EXTI_GPIOx << ((EXTI_Init->EXTI_Line%4) *8));}break;default : break;}switch(EXTI_Init->EXTI_Trigger){case EXTI_Trigger_Rising :{//上升沿/*设置为上升降沿触发*/EXTI->RTSR1 &= ~(0x1 << EXTI_Init->EXTI_Line);EXTI->RTSR1 |= (0x1 << EXTI_Init->EXTI_Line);}break;case EXTI_Trigger_Falling :{//下降沿/*设置为下降沿触发*/EXTI->FTSR1 &= ~(0x1 << EXTI_Init->EXTI_Line);EXTI->FTSR1 |= (0x1 << EXTI_Init->EXTI_Line);}break;case EXTI_Trigger_Rising_Falling :{//双边沿/*设置下降沿触发*/EXTI->FTSR1 &= ~(0x1 << EXTI_Init->EXTI_Line);EXTI->FTSR1 |= (0x1 << EXTI_Init->EXTI_Line);/*设置为上升降沿触发*/EXTI->RTSR1 &= ~(0x1 << EXTI_Init->EXTI_Line);EXTI->RTSR1 |= (0x1 << EXTI_Init->EXTI_Line);}break;}/*设置EXTI不屏蔽*/EXTI->C1IMR1 &= ~(0x1 << EXTI_Init->EXTI_Line);EXTI->C1IMR1 |= (0x1 << EXTI_Init->EXTI_Line);/*设置EXTI不屏蔽*/EXTI->C1IMR1 &= ~(0x1 << EXTI_Init->EXTI_Line);EXTI->C1IMR1 |= (0x1 << EXTI_Init->EXTI_Line);
}/*清除挂起标志位s*/
void EXTI_Clr_FPR1(uint16_t ID)
{EXTI->FPR1 |= 0x1 << ID;
}
6. GICD函数
/*GICD初始化*/
void GICD_Init(GICD_InitTypeDef* GICD_Init)
{/*使能GICD*/GICD->CTRL &= ~(0x3);GICD->CTRL |= GICD_Init->GICD_CPU;/*设置使能寄存器*/GICD->ISENABLER[GICD_Init->GICD_interrupt_ID/32] |= 0x1<<(GICD_Init->GICD_interrupt_ID%32);/*设置中断优先级*/GICD->IPRIORITYR[GICD_Init->GICD_interrupt_ID/4] &= ~(0x1F << ((GICD_Init->GICD_interrupt_ID%32)*8+3));GICD->IPRIORITYR[GICD_Init->GICD_interrupt_ID/4] |= GICD_Init->GICD_priority << ((GICD_Init->GICD_interrupt_ID%32)*8+3);/*设置中断优先级*/GICD->ITARGETSR[GICD_Init->GICD_interrupt_ID/4] &= ~(0x3 << ((GICD_Init->GICD_interrupt_ID%32)*8));GICD->ITARGETSR[GICD_Init->GICD_interrupt_ID/4] |= GICD_Init->GICD_Allocation_CPU << ((GICD_Init->GICD_interrupt_ID%32)*8);
}
/*清除挂起标志位*/
void GICD_Clr_ICPENDR(uint16_t ID)
{GICD->ICPENDR[ID/32] |= 0x1 << ID%32;
}
7. GICC函数
/*GICC初始化*/
void GICC_Init(GICC_InitTypeDef* GICC_Init)
{/*使能CICC*/GICC->CTRL &= ~(0x3);GICC->CTRL |= GICC_Init->GICC_CPU;/*中断优先级设置*/GICC->PMR &= ~(0x1F << 3);GICC->PMR |= GICC_Init->GICC_priority << 3;
}
8. 使用示例
EXTI_InitTypeDef EXTI_InitStructure;EXTI_InitStructure.EXTI_GPIOx = EXTI_GPIOF;EXTI_InitStructure.EXTI_Line = 9;EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;EXTI_InitStructure.EXTI_Wakeup = 1;EXTI_Init(&EXTI_InitStructure);EXTI_InitStructure.EXTI_Line = 8;EXTI_Init(&EXTI_InitStructure);EXTI_InitStructure.EXTI_Line = 7;EXTI_Init(&EXTI_InitStructure);GICD_InitTypeDef GICD_InitStructure;GICD_InitStructure.GICD_CPU = GIC_CPU0;GICD_InitStructure.GICD_Allocation_CPU = GIC_CPU0;GICD_InitStructure.GICD_priority = 0;GICD_InitStructure.GICD_interrupt_ID = 99;GICD_Init(&GICD_InitStructure);GICD_InitStructure.GICD_priority = 1;GICD_InitStructure.GICD_interrupt_ID = 98;GICD_Init(&GICD_InitStructure);GICD_InitStructure.GICD_priority = 2;GICD_InitStructure.GICD_interrupt_ID = 97;GICD_Init(&GICD_InitStructure);GICC_InitTypeDef GICC_InitStructure;GICC_InitStructure.GICC_priority = 4;GICC_InitStructure.GICC_CPU = GIC_CPU0;GICC_Init(&GICC_InitStructure);
相关文章:
Linux 学习记录58(ARM篇)
Linux 学习记录58(ARM篇) 本文目录 Linux 学习记录58(ARM篇)一、GIC相关寄存器1. 系统框图2. 中断号对应关系 二、GICD寄存器1. GICD_CTLR2. GICD_ISENABLERx3. GICD_IPRIORITYRx4. GICD_ITARGETSRx5. GICD_ICPENDRx 三、GICC寄存器1. GICC_PMR2. GICC_CTLR3. GICC_IAR4. GICC_…...
【一文搞懂】—带霍尔编码器的直流有刷减速电机
文章目录 一、直流有刷电机二、减速比三、霍尔编码器3.1 霍尔编码器3.2 霍尔编码器测速原理 四、测速程序设计4.1 跳变沿检测4.2 计算转速 一、直流有刷电机 宏观上说直流有刷电机由固定部分(定子)和旋转部分(转子)组成。在定子上…...
滴水逆向三期笔记与作业——02C语言——05 正向基础/05 循环语句
目录 一、缓冲区溢出的HelloWorld二、永不停止的HelloWorld三、基础知识3.1 变量的声明3.2 类型转换(一般用于小转大)3.3 表达式3.4 语句和程序块3.5 参数与返回值3.6 关系运算符3.7 逻辑运算符:&& || !3.8 单目运算符3.9 三目运算符…...

Python抓取分享页面的源代码示例
本文章是关于利用Python方法来抓取某网站分享页面中的源码方法示例。需要大家注意的是Python抓取分享页面的源代码示例,是要在运行时导入BeautifulSoup.py文件后才可以使用。 Python抓取分享页面的源代码示例,需要用到python urllib2模块方法࿰…...
linux安装nginx遇到的报错
1、Linux如何修改只读文件(以设置自动连网为例) vim /etc/sysconfig/network-scripts/ifcfg-ens33 然后提示 E45:已设定选项“readonly”(请加!强制执行) 如果需要强制修改,可以使用࿰…...

一起学SF框架系列5.8-spring-Beans-Bean注解解析3-解析配置component-scan
本文主要讲述Spring是如何解析“context:component-scan”元素,扫描加载目录下的BeanDefinition。 解析内容 1、解析的元素如下: <!-- 注解模式:配置bean扫描路径(注:自动包含子路径) --><conte…...
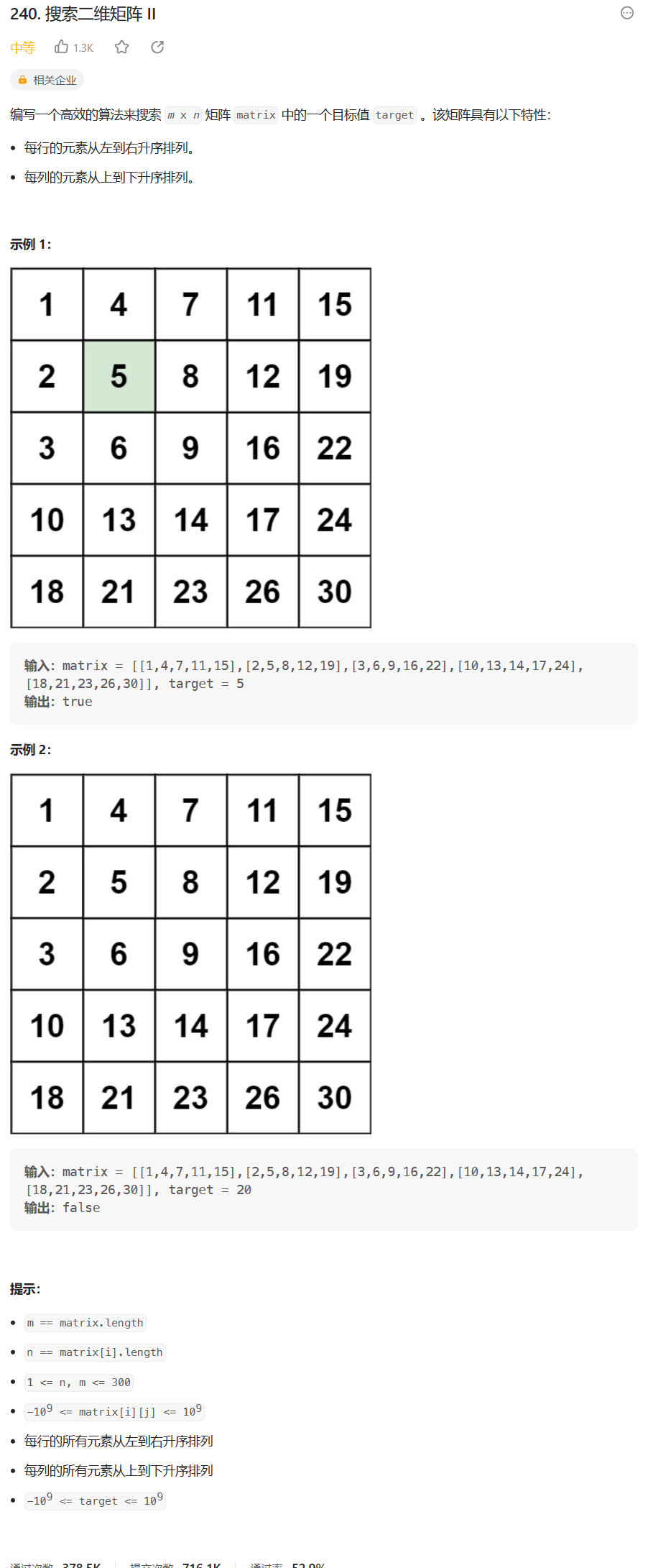
【LeetCode热题100】打卡第42天:滑动窗口最大值搜索二维矩阵II
文章目录 【LeetCode热题100】打卡第42天:滑动窗口最大值&搜索二维矩阵II⛅前言 滑动窗口最大值🔒题目🔑题解 搜索二维矩阵II🔒题目🔑题解 【LeetCode热题100】打卡第42天:滑动窗口最大值&搜索二维…...

[uni-app] 微信小程序 - 组件找不到/导入报错 (分包问题导致)
文章目录 问题表现问题原因 问题表现 切换了个路径下的组件, 导入失败, 尝试了清缓存\重启\删项目等一些列操作均无效 上面两个路径中, 都存在一模一样的videItem.vue Main路径是可以导入的 Main路径是无法导入的 问题原因 后来发现, 是 分包的问题导致. 我们先来假设一个场…...

从零构建医疗领域知识图谱的KBQA问答系统:其中7类实体,约3.7万实体,21万实体关系。
项目设计集合(人工智能方向):助力新人快速实战掌握技能、自主完成项目设计升级,提升自身的硬实力(不仅限NLP、知识图谱、计算机视觉等领域):汇总有意义的项目设计集合,助力新人快速实…...

编程小白的自学笔记十二(python爬虫入门四Selenium的使用实例二)
系列文章目录 编程小白的自学笔记十一(python爬虫入门三Selenium的使用实例详解) 编程小白的自学笔记十(python爬虫入门二实例代码详解) 编程小白的自学笔记九(python爬虫入门代码详解) 目录 系列文章…...

技术笔记2023076 rBoot学习7
技术笔记2023076 rBoot学习7 继续之前的学习。 代码分析:函数find_image() // prevent this function being placed inline with main // to keep mains stack size as small as possible // dont mark as static or itll be optimised out when // using the ass…...

收藏这6个抠图工具,一键抠图不用愁!
在图片编辑工作中,抠图是设计师常用的操作。随着设计工具的不断增加,抠图操作摆脱了过去繁琐的操作步骤,几乎可以一键完成。今天本文将为大家介绍6个好用的抠图工具,一起来看看吧! 1、皮卡智能抠图 皮卡智能抠图是一…...
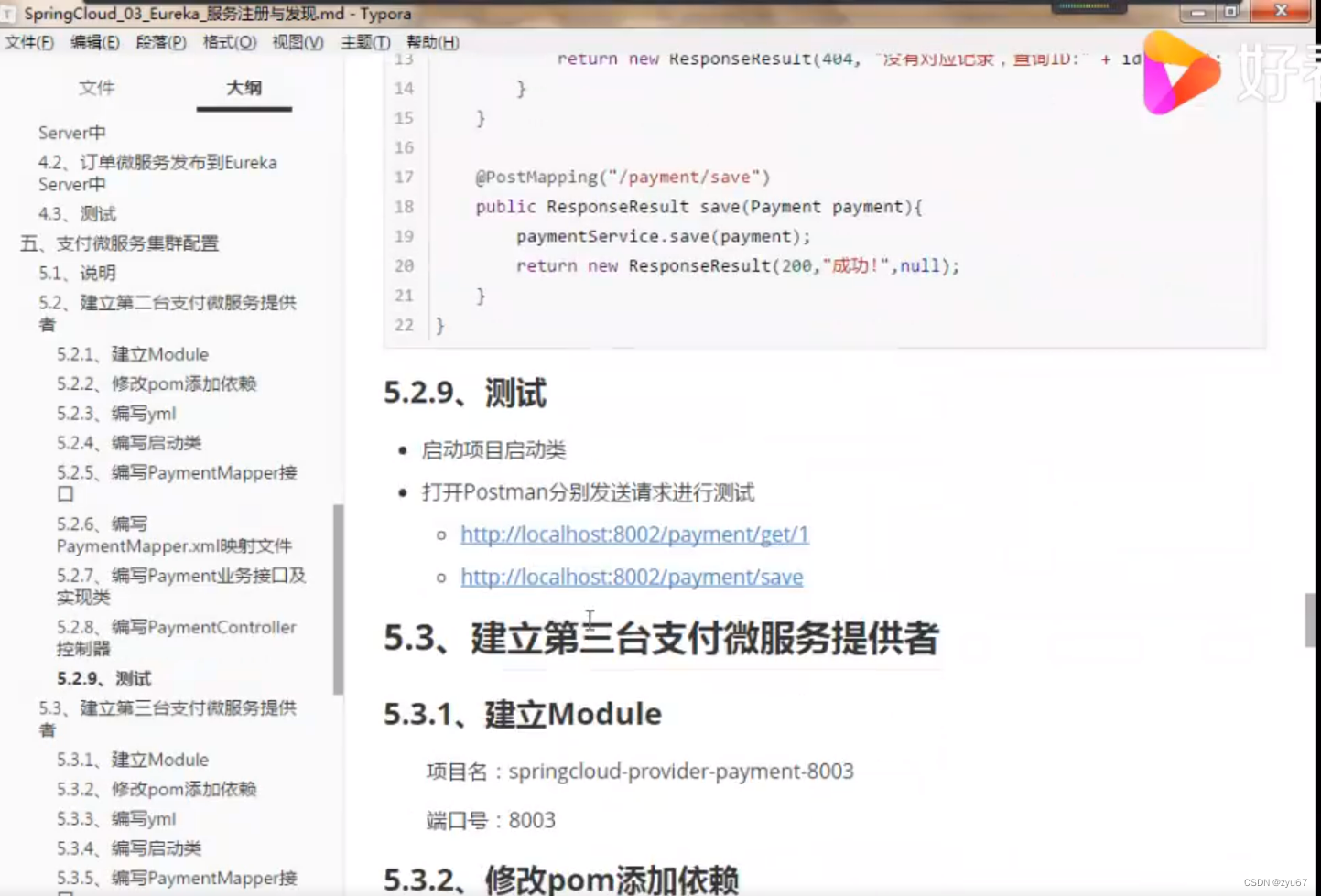
四,Eureka 第四章
2.1.3 增加依赖 <!--添加依赖--><dependencies><!--Eureka Server--><dependency><groupId>org.springframework.cloud</groupId><artifactId>spring-cloud-starter-netflix-eureka-server</artifactId></dependency>&l…...
k8s常见的资源对象使用
目录 一、kubernetes内置资源对象 1.1、kubernetes内置资源对象介绍 1.2、kubernetes资源对象操作命令 二、job与cronjob计划任务 2.1、job计划任务 2.2、cronjob计划任务 三、RC/RS副本控制器 3.1、RC副本控制器 3.2、RS副本控制器 3.3、RS更新pod 四、Deployment副…...
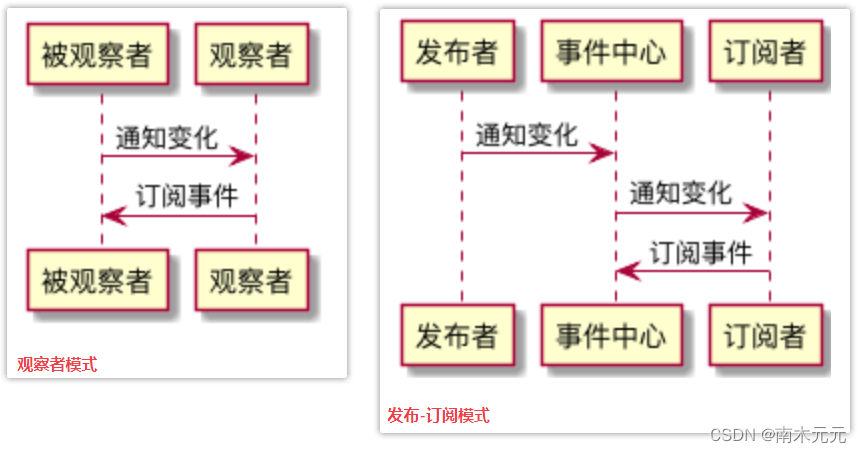
JavaScript 简单实现观察者模式和发布订阅模式
JavaScript 简单实现观察者模式和发布订阅模式 1. 观察者模式1.1 如何理解1.2 代码实现 2. 发布订阅模式2.1 如何理解2.2 代码实现 1. 观察者模式 1.1 如何理解 概念:观察者模式定义对象间的一种一对多的依赖关系,当一个对象的状态发生改变时ÿ…...
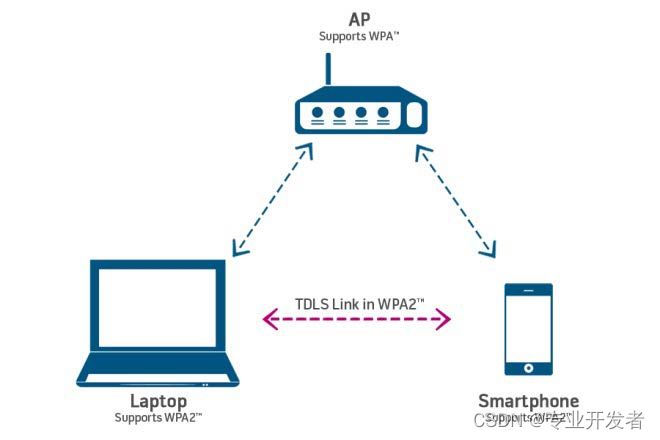
高通WLAN框架学习(37)-- TDLS(Tunneled Direct Link Setup)通道直接链路建立
一 TDLS概述 隧道直连设置(TDLS)基于IEEE 802.11z-2010IEEE标准802.11z标准(无线局域网介质访问控制(MAC)和物理层(PHY)规范。 TDLS允许与同一AP关联的设备之间建立直接链路。Wi-Fi Direct允许设备之间直接连接,而不需要AP。Wi-Fi联盟认证可用于IEEE 802.11a和802.11g设备的T…...

高算力AI模组前沿应用:基于ARM架构的SoC阵列式服务器
本期我们带来高算力AI模组前沿应用,基于ARM架构的SoC阵列式服务器相关内容。澎湃算力、创新架构、异构计算,有望成为未来信息化社会的智能算力底座。 ▌性能优势AI驱动,ARM架构服务器加速渗透 一直以来,基于ARM架构的各类处理器…...

老年公寓人员定位管理系统:提升安全与关怀的智能解决方案
老年公寓作为提供安全居住环境和关怀服务的重要场所,面临着人员管理和安全控制的挑战。为了解决这些问题,老年公寓人员定位管理系统应运而生。基于为提供全面的安全管理和个性化关怀服务,华安联大便通过老年公寓人员定位管理系统的技术原理、…...

每日一题之两个字符串的删除操作
题目链接 给定两个单词 word1 和 word2 ,返回使得 word1 和 word2 **相同所需的最小步数。 每步 可以删除任意一个字符串中的一个字符。 示例 1: 输入: word1 "sea", word2 "eat" 输出: 2 解释: 第一步将 "sea" 变…...
nacos安装与基础配置
源码 https://github.com/alibaba/nacos https://gitee.com/mirrors/Nacos 编译 git clone https://github.com/alibaba/nacos.git cd nacos/ mvn -Prelease-nacos -Dmaven.test.skiptrue clean install -U ls -al distribution/target/// change the $version to your ac…...

Qwen3-Coder-30B-A3B-Instruct-FP8:终极代码模型对比分析指南
Qwen3-Coder-30B-A3B-Instruct-FP8:终极代码模型对比分析指南 【免费下载链接】Qwen3-Coder-30B-A3B-Instruct-FP8 项目地址: https://ai.gitcode.com/hf_mirrors/Qwen/Qwen3-Coder-30B-A3B-Instruct-FP8 在当今AI代码生成领域,Qwen3-Coder-30B-…...

本地柴油发电机组排行2023年最新榜单
柴油发电机是通过燃烧柴油驱动发动机,进而发电的设备,广泛应用于电力中断或无电网地区。1. 柴油发电机的核心工作原理是什么?柴油发电机是一种将化学能转化为电能的设备,其核心是柴油发动机与交流发电机的组合。当柴油在发动机内燃…...

Gofile批量下载自动化工具:5步实现高效文件管理解决方案
Gofile批量下载自动化工具:5步实现高效文件管理解决方案 【免费下载链接】gofile-downloader Download files from https://gofile.io 项目地址: https://gitcode.com/gh_mirrors/go/gofile-downloader 在当今数字化工作环境中,技术团队经常需要从…...

配置OpenClaw Agent使用Taotoken作为后端模型提供商
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 配置OpenClaw Agent使用Taotoken作为后端模型提供商 基础教程类,指导希望使用OpenClaw等Agent工具的开发者,…...
)
Claude端到端测试设计:从零搭建可审计、可回放、可量化的AI服务测试流水线(含开源Schema校验工具)
更多请点击: https://codechina.net 第一章:Claude端到端测试设计 端到端测试是验证Claude模型在真实用户交互链路中行为一致性的关键手段。它覆盖从原始提示输入、上下文管理、流式响应生成,到输出解析与业务校验的全路径,确保模…...

FairyGUI Unity鼠标悬停与点击对象获取原理与实战
1. 这不是“加个OnMouseEnter就能用”的事:FairyGUI在Unity中处理鼠标交互的真实困境很多人第一次在Unity里集成FairyGUI,想实现“鼠标悬停显示提示”或“点击高亮当前按钮”,下意识就去翻Unity的MonoBehaviour文档,找OnMouseEnte…...
)
告别SVN恐惧症:美术策划也能轻松上手的Unity PlasticSCM极简入门(附团队项目拉取实战)
告别SVN恐惧症:美术策划也能轻松上手的Unity PlasticSCM极简入门(附团队项目拉取实战) 在游戏开发团队中,版本控制系统是协作的基石,但传统工具如SVN往往让非技术成员望而生畏。当美术资源频繁更新、策划案不断迭代时&…...

基于USB ACA模式实现安卓手机边玩边充的游戏手柄设计
1. 项目缘起:当手机性能过剩,却败给了触摸屏几年前,我清理手机游戏时,发现一个挺无奈的现象:性能足以媲美掌机的智能手机里,只剩下一些慢节奏的平台解谜或者数独。那些曾经让我在掌机上废寝忘食的赛车、动作…...

因果推断与机器学习融合:量化分析社会运动中镇压与抗议的动态关系
1. 项目概述:当数据科学遇见社会运动如果你研究过社会运动,尤其是那些看似突然爆发、席卷全国的抗议浪潮,你可能会被一个核心问题困扰:国家机器的镇压,究竟是浇灭火焰的冷水,还是火上浇油的催化剂ÿ…...

网飞成立 AI 动画工作室,开启流媒体“原生 AI 制片时代”,中外布局逻辑有何不同?
1. Netflix“偷跑”在影视巨头关于 AIGC 的军备竞赛中,Netflix 再次加速。据外媒 TheVerge 报道,网飞于今年 3 月成立了名为 "INKubator" 的工作室,这是全球流媒体巨头中首个以生成式人工智能为核心的动画制作部门。此动作引发全球…...